Formal Methods in System Design ( IF 0.8 ) Pub Date : 2022-08-18 , DOI: 10.1007/s10703-022-00395-7 Angelo Ferrando , Rafael C. Cardoso , Marie Farrell , Matt Luckcuck , Fabio Papacchini , Michael Fisher , Viviana Mascardi
|
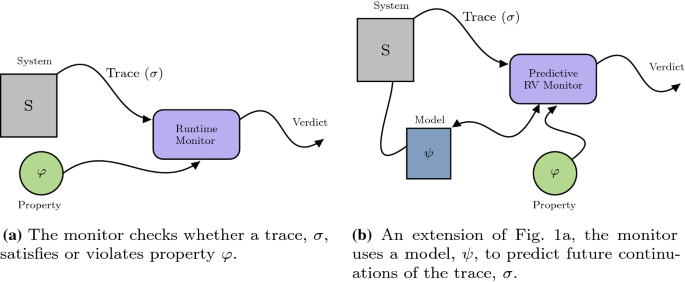
This paper presents an extension of the Predictive Runtime Verification (PRV) paradigm to consider multiple models of the System Under Analysis (SUA). We call this extension Multi-Model PRV. Typically, PRV attempts to predict the satisfaction or violation of a property based on a trace and a (single) formal model of the SUA. However, contemporary node- or component-based systems (e.g. robotic systems) may benefit from monitoring based on a model of each component. We show how a Multi-Model PRV approach can be applied in either a centralised or a compositional way (where the property is compositional), as best suits the SUA. Crucially, our approach is formalism-agnostic. We demonstrate our approach using an illustrative example of a Mars Curiosity rover simulation and evaluate our contribution via a prototype implementation.
中文翻译:
缩小单模型和多模型预测运行时验证之间的差距
本文介绍了预测运行时验证 (PRV) 范式的扩展,以考虑被分析系统 (SUA) 的多个模型。我们将此扩展称为多模型PRV。通常,PRV 会尝试基于 SUA 的跟踪和(单个)正式模型来预测财产的满足或违反。然而,当代基于节点或组件的系统(例如机器人系统)可能会受益于基于每个组件模型的监控。我们展示了多模型 PRV 方法如何应用于集中式或组合式方式(属性是组合的),最适合 SUA。至关重要的是,我们的方法与形式主义无关。我们使用火星好奇号漫游车模拟的说明性示例演示我们的方法,并通过原型实现评估我们的贡献。


























 京公网安备 11010802027423号
京公网安备 11010802027423号