Journal of Computer and Systems Sciences International ( IF 0.6 ) Pub Date : 2022-10-08 , DOI: 10.1134/s1064230722050069 M. Z. Dosaev , L. A. Klimina , V. A. Samsonov , Yu. D. Selyutsky
|
Abstract
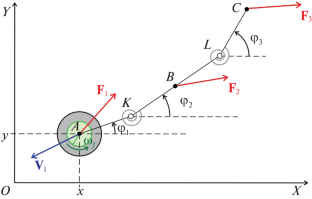
A snake robot moving along a rough plane is considered. Anisotropic dry friction acts at the points of contact with the support. The link joints are passive, but coil springs are installed in them. The following robot configurations are compared: one-, two-, and three-link. The only control action is the torque applied to the flywheel installed in the head link. A control is constructed that ensures the steady motion of the robot, in which the center of mass moves along a serpentine trajectory. The specified configurations with identical dimensions, weight, and control restrictions are compared in terms of the average velocity of the progression of the center of mass and by the width of the path required for movement.
中文翻译:
存在各向异性干摩擦和单一控制输入的蛇形机器人平面平行运动
摘要
考虑沿粗糙平面移动的蛇形机器人。各向异性干摩擦作用于与支撑的接触点。连杆接头是被动的,但其中安装了螺旋弹簧。比较了以下机器人配置:一连杆、二连杆和三连杆。唯一的控制动作是施加到安装在头部连杆中的飞轮上的扭矩。构造了一个控制,以确保机器人的稳定运动,其中质心沿着蛇形轨迹移动。具有相同尺寸、重量和控制限制的指定配置根据质心前进的平均速度和移动所需路径的宽度进行比较。


























 京公网安备 11010802027423号
京公网安备 11010802027423号