International Journal of Intelligent Robotics and Applications Pub Date : 2023-02-16 , DOI: 10.1007/s41315-023-00272-4 Rajesh Kannan Megalingam , Santosh Tantravahi , Hemanth Sai Surya Kumar Tammana , Hari Sudarshan Rahul Puram
|
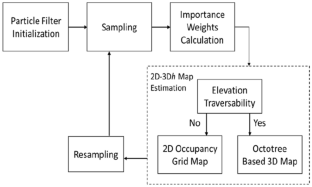
Computational complexity is one of the critical attributes of robot design. Mapping, a vitally important feature of auto-navigation of robots is one such area where computational complexity is of concern. An appropriate spatial representation of the surroundings is required for efficient path planning. Creation of a 2D map alone for a given environment is not sufficient even though it has the least computational complexity. 3D occupancy grid maps and 3D normal distribution maps need larger space and time. This research proposes an efficient hybrid mapping technique (2D-3Dh) which uses both 2D and 3D sensor data mapping to represent an efficient and compact representation of the environments aiming at reducing the computational complexity. The 2D maps are built from the laser data obtained from the Light Detection and Ranging (LiDAR) sensor and 3D maps are built from the data obtained from the Kinect sensor. The proposed algorithm efficiently organizes the 2D-3Dh map in such a way that the mapping switches from 2 to 3D only when an elevation region is detected in the environment. The newly generated map consists of both 2D and 3D data, with optimized mapping time and storage capacity requirements. Simulation results indicate that the proposed hybrid mapping can save mapping time up to 46.7% and storage space up to 98.5%. Real time experiments show that 2D-3Dh mapping can save more than 33% of memory space and requires less than half the time compared to that of full 3D mapping.
中文翻译:
用于自主机器人路径规划的 2D-3D 混合映射
计算复杂性是机器人设计的关键属性之一。映射是机器人自动导航的一个极其重要的特征,是计算复杂性值得关注的领域之一。有效的路径规划需要对周围环境进行适当的空间表示。仅针对给定环境创建 2D 地图是不够的,即使它具有最少的计算复杂性。3D 占用网格图和 3D 正态分布图需要更大的空间和时间。本研究提出了一种高效的混合映射技术(2D-3D h) 它使用 2D 和 3D 传感器数据映射来表示环境的高效和紧凑表示,旨在降低计算复杂性。2D 地图是根据从光探测和测距 (LiDAR) 传感器获得的激光数据构建的,而 3D 地图是根据从 Kinect 传感器获得的数据构建的。所提出的算法有效地组织 2D-3D h以这样一种方式进行映射,即仅当在环境中检测到高程区域时,映射才会从 2D 切换到 3D。新生成的地图由 2D 和 3D 数据组成,具有优化的映射时间和存储容量要求。仿真结果表明,所提出的混合映射可以节省高达 46.7% 的映射时间和高达 98.5% 的存储空间。实时实验表明,与全 3D 映射相比,2D-3Dh 映射可以节省超过 33% 的内存空间,并且需要的时间不到一半。


























 京公网安备 11010802027423号
京公网安备 11010802027423号