International Journal of Intelligent Robotics and Applications Pub Date : 2023-03-22 , DOI: 10.1007/s41315-023-00277-z Chaoming Yang , Zhenhui Fan , Qiju Zhu , Pengxiang Yang , Chunbo Mei , Baofeng Lu
|
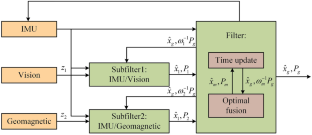
The autonomous navigation system is of vital importance and great urgency for unmanned ground vehicles (UGVs) in GNSS-challenged/denied environments. This paper aims to develop a robust IMU/vision/geomagnetic integrated navigation system, which can provide position and attitude estimation for UGVs during long endurance. The core idea of this paper is to integrate the navigation information estimated by continuous vision, IMU mechanization, and Geomagnetic measurement based on a federated Kalman filter (FKF). Considering the instability of the continuous vision system, the global position generated by its matching with the prior map is introduced to the IMU/vision subfilter. Together with the local attitude and position, the measurement of the subfilter is formed. In order to improve the robustness of the global attitude, the north angle and the geomagnetic increment are utilized together to form an IMU/geomagnetic subfilter. Then, the FKF algorithm is designed to integrate the two subfilters. Experiments in the urban roads are carried out and the results demonstrate the effectiveness of the proposed system. The statistical results of dozens of experiments show that the attitude error of the proposed system is 0.384\(^{\circ }\) (2d RMS, 95%) and the positioning error is 3.77 m (2d RMS, 95%).
中文翻译:
基于IMU/视觉/地磁融合的UGV鲁棒导航系统
在 GNSS 挑战/拒绝环境中,自主导航系统对于无人驾驶地面车辆 (UGV) 至关重要和紧迫。本文旨在开发一种鲁棒的 IMU/视觉/地磁组合导航系统,可为 UGV 在长航时提供位置和姿态估计。本文的核心思想是基于联合卡尔曼滤波器(FKF)集成连续视觉、IMU 机械化和地磁测量估计的导航信息。考虑到连续视觉系统的不稳定性,将其与先验图匹配产生的全局位置引入IMU/视觉子滤波器。与局部姿态和位置一起,形成子滤波器的测量。为了提高全局态度的鲁棒性,北角和地磁增量共同构成IMU/地磁子滤波器。然后,设计 FKF 算法来集成两个子滤波器。在城市道路上进行了实验,结果证明了所提出系统的有效性。数十次实验的统计结果表明,所提系统的姿态误差为0.384\(^{\circ }\) (2d RMS, 95%) 定位误差为 3.77 m (2d RMS, 95%)。


























 京公网安备 11010802027423号
京公网安备 11010802027423号