International Journal of Intelligent Robotics and Applications Pub Date : 2023-03-24 , DOI: 10.1007/s41315-023-00276-0 Manman Yang , Erfu Yang
|
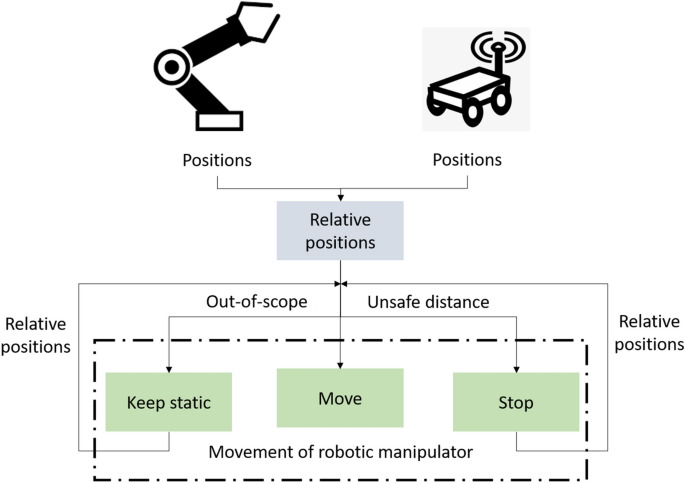
The stoppage of a mobile platform is generally scheduled to feed parts for machines on production lines, such as fenced industrial robotic manipulators. A non-stop mobile robotic part feeding system can contribute to production efficiency and flexibility but contains several challenging tasks. For example, the industrial robotic manipulator needs to perceive the positions of the mobile robot accurately and robustly before grasping the supplies when the mobile robot moves around. Thus, based on the relative distance between the two robots, an interaction mode of the integrated robotic system consisting of a fixed robotic manipulator and a mobile robot is developed for robotic interaction. In order to accurately and robustly perceive the positions of a mobile robot, two different positioning approaches for the robotic manipulator positioning mobile robot in an indoor environment are utilised. One approach is ultrasonic sensors fused with inertia measurement units (IMU) by extended Kalman filter (EKF). Furthermore, an outlier rejection mechanism is implemented to escape outliers from ultrasonic measurement. Another positioning approach is achieved by detecting an ArUco marker with visual sensor. Lastly, a positioning switching strategy according to the visual sensor state allows the robotic manipulator to reposition the mobile robot seamlessly. According to the static experiments, EKF-based positioning approach fusing IMU with ultrasonic sensor can export high-accuracy (the root mean square error is 0.04 m) and high-precision (the standard deviation is 0.0033 m) in positioning while keeping a high update frequency of 181.9 HZ in static positioning. Evaluations through dynamic experiments demonstrate that the proposed positioning system can suppress the positioning drifts over time in comparison with wheel encoder-based positioning method. The two-stage repositioning strategy can support the robotic manipulator to identify the positions of the mobile robot robustly, even in the case when the visual sensor is occluded.
中文翻译:
协同移动机器人与机械臂系统无缝切换的二级多传感器融合定位系统
移动平台的停工通常是为生产线上的机器提供零件,例如围栏式工业机器人机械手。不间断移动机器人零件进给系统有助于提高生产效率和灵活性,但包含多项具有挑战性的任务。例如,工业机器人机械手需要在移动机器人四处走动时准确、稳健地感知移动机器人的位置,然后抓取物资。因此,基于两个机器人之间的相对距离,开发了由固定机器人机械手和移动机器人组成的集成机器人系统的交互模式,用于机器人交互。为了准确而稳健地感知移动机器人的位置,机器人机械手在室内环境中定位移动机器人采用了两种不同的定位方法。一种方法是通过扩展卡尔曼滤波器 (EKF) 将超声波传感器与惯性测量单元 (IMU) 融合在一起。此外,实施了异常值拒绝机制以从超声波测量中逃脱异常值。另一种定位方法是通过使用视觉传感器检测 ArUco 标记来实现的。最后,根据视觉传感器状态的定位切换策略允许机器人操纵器无缝地重新定位移动机器人。根据静态实验,基于 EKF 的融合 IMU 和超声波传感器的定位方法可以输出高精度(均方根误差为 0.04 m)和高精度(标准差为 0. 0033 m)定位,同时在静态定位中保持 181.9 HZ 的高更新频率。通过动态实验的评估表明,与基于车轮编码器的定位方法相比,所提出的定位系统可以抑制随时间的定位漂移。两阶段重新定位策略可以支持机器人操纵器稳健地识别移动机器人的位置,即使在视觉传感器被遮挡的情况下也是如此。


























 京公网安备 11010802027423号
京公网安备 11010802027423号