Genetic Programming and Evolvable Machines ( IF 2.6 ) Pub Date : 2023-03-28 , DOI: 10.1007/s10710-023-09452-4 Fraser Borrett , Mark Beckerleg
|
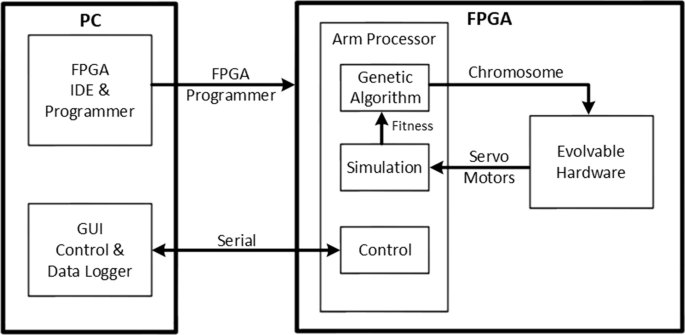
This paper investigates the implementation of a novel evolvable hardware controller used in evolutionary robotics. The evolvable hardware consists of a Cartesian based array of logic blocks comprised of multiplexers and logic elements. The logic blocks are configured by a bit stream which is evolved using a genetic algorithm. A comparison is performed between an evolvable hardware and an artificial neural network controller evolved using the same genetic algorithm to produce the gait of a hexapod robot. To compare the two controllers, differences in their evolutionary efficiency and robot performance are investigated. The evolutionary efficiency is measured by the required number of generations to achieve an optimal fitness. An optimal hexapod controller allows the robot to walk forward in a straight line maintaining a constant heading and body attitude. It was found that the evolutionary efficiency and performance of the evolvable hardware and artificial neural network were similar, however the EHW was the most evolutionary efficient requiring less generations on average to evolve. Both evolved controllers were evaluated in simulation, and on a physical robot using a softcore processor and custom hardware implemented on a FPGA. The implementation showed that the controllers performed equally well when deployed, allowing the hexapod to meet the optimal gait criteria. These findings have shown that the evolvable hardware controller is a valid option for robotic control of a multilegged robot such as a hexapod as its evolutionary efficiency and deployed performance on a real robot is comparable to that of an artificial neural network. One future application of these evolvable controllers is in fault tolerance where the robot can dynamically adapt to a fault by evolving the controller to adjust to the fault conditions.
中文翻译:
可进化硬件控制器与用于进化六足机器人步态的人工神经网络的比较
本文研究了一种用于进化机器人的新型可进化硬件控制器的实现。可演化硬件由基于笛卡尔的逻辑块阵列组成,逻辑块阵列由多路复用器和逻辑元件组成。逻辑块由使用遗传算法演化的比特流配置。对可进化硬件和使用相同遗传算法进化的人工神经网络控制器进行比较,以产生六足机器人的步态。为了比较这两个控制器,研究了它们在进化效率和机器人性能方面的差异。进化效率是通过达到最佳适应性所需的世代数来衡量的。最佳的六足机器人控制器允许机器人直线向前行走,保持恒定的航向和身体姿态。结果发现,可进化硬件和人工神经网络的进化效率和性能相似,但 EHW 的进化效率最高,平均需要更少的世代进化。两种进化的控制器都在仿真中进行了评估,并在使用软核处理器和在 FPGA 上实现的定制硬件的物理机器人上进行了评估。实施表明,控制器在部署时表现同样出色,使六足动物能够满足最佳步态标准。这些发现表明,可进化的硬件控制器是机器人控制多足机器人(例如六足机器人)的有效选择,因为它在真实机器人上的进化效率和部署性能可与人工神经网络相媲美。这些可进化控制器的未来应用之一是容错,其中机器人可以通过进化控制器来动态适应故障以适应故障条件。


























 京公网安备 11010802027423号
京公网安备 11010802027423号