Flexible Services and Manufacturing Journal ( IF 2.7 ) Pub Date : 2023-04-12 , DOI: 10.1007/s10696-023-09494-x Muhammet Ceyhan Şahin , Mustafa Kemal Tural
|
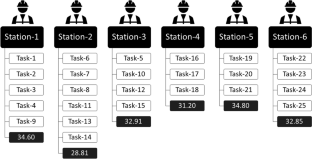
To keep up with the Industry 4.0 technological revolution and get the upper hand over competitors, manufacturing companies replace human workers with robots in their assembly processes. A popular approach in the manufacturing industry is to design an assembly line with human-robot collaboration. In this study, we investigate a robotic stochastic assembly line balancing problem (RSALBP), with the motivation to observe the effects of robots on the cycle time in stochastic assembly lines where human workers and robots operate in different workstations. In the literature, robotic assembly line balancing is only studied with deterministic task times. However, assembly line balancing contains stochastic processes in real life. We assume that the processing time of each task follows a normal distribution whose parameters depend on the type of the operator performing the task with robots having much less (possibly zero) variation in task times than human workers. It is assumed that human workers are fully capable while robots are able to perform a subset of the tasks. We study type-II RSALBP which aims to minimize the cycle time for an assembly line with stochastic task times, given a fixed number of workstations and robots. This problem is NP-hard and includes non-linearity. We propose a mixed-integer second-order cone programming formulation and a constraint programming formulation to solve the problem. Instances from the literature are used to test the effectiveness of the proposed formulations. Additionally, the effects of robots on cycle times are evaluated by conducting a computational study with a comprehensive experimental design.
中文翻译:
机器人随机装配线平衡
为了跟上工业 4.0 技术革命并在竞争中占据上风,制造企业在装配过程中用机器人取代了人工。制造业中一种流行的方法是设计一条人机协作的装配线。在这项研究中,我们研究了一个机器人随机装配线平衡问题 (RSALBP),目的是观察机器人对随机装配线周期时间的影响,其中人类工人和机器人在不同的工作站操作。在文献中,机器人装配线平衡仅在确定性任务时间下进行研究。然而,装配线平衡包含现实生活中的随机过程。我们假设每个任务的处理时间服从正态分布,其参数取决于执行任务的操作员的类型,而机器人在任务时间上的变化比人类工人少得多(可能为零)。假设人类工人完全有能力,而机器人能够执行部分任务。我们研究了 II 型 RSALBP,其目的是在给定固定数量的工作站和机器人的情况下,最小化具有随机任务时间的装配线的循环时间。这个问题是 NP-hard 并且包含非线性。我们提出了混合整数二阶锥规划公式和约束规划公式来解决该问题。文献中的实例用于测试所提出的配方的有效性。此外,


























 京公网安备 11010802027423号
京公网安备 11010802027423号