Autonomous Robots ( IF 3.5 ) Pub Date : 2023-04-25 , DOI: 10.1007/s10514-023-10103-x Hao-Yun Chen , Pei-Han Huang , Li-Chen Fu
|
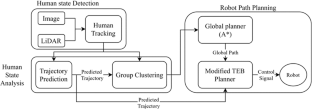
This paper propose a hierarchical path planning algorithm that first captures the local crowd movement around the robot using RGB camera combined with LiDAR and predicts the movement of people nearby the robot, and then generates appropriate global path for the robot using the global path planner with the crowd information. After deciding the global path, the low-level control system receives the prediction results of the crowd and high-level global path, and generates the actual speed control commands for the robot after considering the social norms. With the high accuracy of computer vision for human recognition and the high precision of LiDAR, the system is able to accurately track the surrounding human locations. Through high-level path planning, the robot can use different movement strategies in different scenarios, while the crowd prediction allows the robot to generate more efficient and socially acceptable paths. With this system, even in a highly dynamic environment caused by the crowd, the robot can still plan an appropriate path reach the destination without causing psychological discomfort to others successfully.
中文翻译:
基于人体轨迹预测和混合感知的移动机器人社交人群导航
本文提出了一种分层路径规划算法,首先使用 RGB 相机结合 LiDAR 捕获机器人周围的局部人群运动,并预测机器人附近人员的运动,然后使用全局路径规划器为机器人生成合适的全局路径人群信息。确定全局路径后,低级控制系统接收人群和高层全局路径的预测结果,并在考虑社会规范后为机器人生成实际速度控制命令。凭借计算机视觉对人体识别的高精度和激光雷达的高精度,系统能够准确跟踪周围的人体位置。通过高层次的路径规划,机器人可以在不同的场景下使用不同的运动策略,而人群预测允许机器人生成更有效和社会可接受的路径。有了这个系统,即使在人群造成的高度动态环境中,机器人仍然可以成功地规划出一条合适的路径到达目的地,而不会给他人造成心理上的不适。


























 京公网安备 11010802027423号
京公网安备 11010802027423号