International Journal of Intelligent Robotics and Applications Pub Date : 2023-04-25 , DOI: 10.1007/s41315-023-00281-3 Allal Tiberkak 1 , Abdelfetah Hentout 2 , Abdelkader Belkhir 3
|
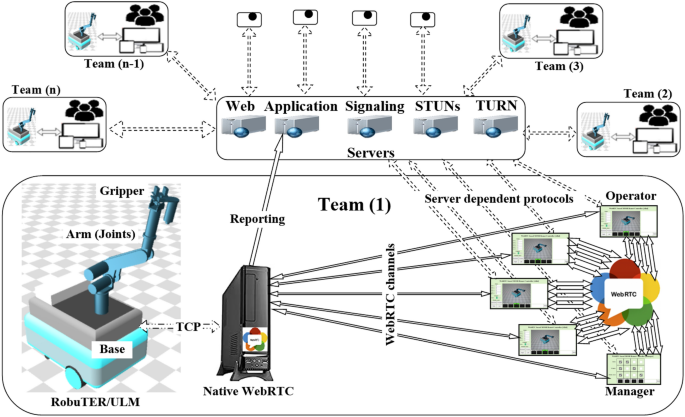
This article describes a contribution to the field of telerobotics via the Internet through the development of a web-based platform allowing the remote control of robots by multiple users, simultaneously. It also deals with minimizing the execution times of tasks by reducing connection and interaction delays. For this purpose, the Web Real-Time Communication (WebRTC) technology is utilized. The developed remote manipulation system allows the operators to visualize the robot, its surroundings and the data incoming from its sensors, and to carry out basic tasks, either independently by the manipulator or by the mobile robot, or jointly by both mechanical sub-systems. In addition, to ensure the control of the remote robot by several operators simultaneously, a priority system managing parallel tasks and a chat system between the operators have been proposed. Besides, many teams are able to exploit the robot, concurrently. The WebRTC-based Multiple Operator Single Robot (MOSR) telerobotic platform is validated on the emulator of the RobuTER/ULM mobile manipulator through various scenarios of primitive tasks over the Internet.
中文翻译:
基于WebRTC的MOSR移动机械臂远程控制
本文介绍了通过开发基于网络的平台,允许多个用户同时远程控制机器人,通过互联网对远程机器人领域做出的贡献。它还通过减少连接和交互延迟来最大限度地减少任务的执行时间。为此,利用了网络实时通信(WebRTC )技术。开发的远程操纵系统允许操作员可视化机器人、其周围环境以及从传感器输入的数据,并由操纵器或移动机器人独立执行基本任务,或由两个机械子系统联合执行。此外,为了确保多个操作员同时控制远程机器人,提出了管理并行任务的优先级系统和操作员之间的聊天系统。此外,许多团队能够同时利用该机器人。基于 WebRTC 的多操作员单机器人( MOSR ) 远程机器人平台在RobuTER/ULM移动机械手的模拟器上通过互联网上的各种原始任务场景进行了验证。


























 京公网安备 11010802027423号
京公网安备 11010802027423号