International Journal of Intelligent Robotics and Applications Pub Date : 2023-05-05 , DOI: 10.1007/s41315-023-00282-2 Hakkı Güçlü , Adnan Cora
|
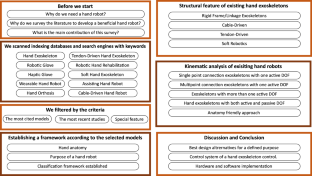
This study presents a comparative analysis to be a resource for those who want to work in the wearable hand robot field. The fact that robotic rehabilitation is more accessible than classical methods and shows promising results increases interest in it. When the last 20 years are analyzed, the number of studies in this field has increased continuously, without exception. According to Google Scholar data, 17,200 studies were conducted only in 2022 related to hand rehabilitation robots. When the literature is reviewed, thousands of studies are faced with design and control systems that seem to have been designed into many different types and structures. The number of studies reviewing and surveying some of these is also insufficient to solve the confusion in the minds of the researchers in a shorter way. Rather than reporting what other researchers have done, our work is based on classifying and putting concepts together instead of creating dozens of sub-categories. We aim to inform researchers who are interested in the field but are hesitant, to create a template in their minds, and to suggest the most beneficial design alternatives in terms of mechanics and hardware-software implementations. The most cited and recent studies were selected, and a systematic categorization was made based on criteria such as kinematic design, control system, and actuator type. The kinematic categorization it employs is an original classification specific to this study and has been applied to all models examined.
中文翻译:
用于辅助、康复和触觉应用的可穿戴手机器人设计调查
本研究提出了一个比较分析,为那些想在可穿戴机器人领域工作的人提供资源。机器人康复比经典方法更容易获得并且显示出有希望的结果这一事实增加了人们对它的兴趣。分析近20年,这一领域的研究数量无一例外地不断增加。根据谷歌学术数据,仅在 2022 年就进行了 17,200 项与手部康复机器人相关的研究。回顾文献时,成千上万的研究面临着设计和控制系统,这些系统似乎被设计成许多不同的类型和结构。回顾和调查其中一些的研究数量也不足以以较短的方式解决研究人员心中的困惑。我们的工作不是报告其他研究人员所做的事情,而是基于对概念进行分类和组合,而不是创建数十个子类别。我们的目标是告知对该领域感兴趣但犹豫不决的研究人员,在他们的脑海中创建一个模板,并在力学和硬件软件实现方面提出最有益的设计替代方案。选择了引用最多和最近的研究,并根据运动学设计、控制系统和执行器类型等标准进行了系统分类。它采用的运动学分类是本研究特有的原始分类,并已应用于所有检查的模型。我们的目标是告知对该领域感兴趣但犹豫不决的研究人员,在他们的脑海中创建一个模板,并在力学和硬件软件实现方面提出最有益的设计替代方案。选择了引用最多和最近的研究,并根据运动学设计、控制系统和执行器类型等标准进行了系统分类。它采用的运动学分类是本研究特有的原始分类,并已应用于所有检查的模型。我们的目标是告知对该领域感兴趣但犹豫不决的研究人员,在他们的脑海中创建一个模板,并在力学和硬件软件实现方面提出最有益的设计替代方案。选择了引用最多和最近的研究,并根据运动学设计、控制系统和执行器类型等标准进行了系统分类。它采用的运动学分类是本研究特有的原始分类,并已应用于所有检查的模型。并根据运动学设计、控制系统和执行器类型等标准进行了系统分类。它采用的运动学分类是本研究特有的原始分类,并已应用于所有检查的模型。并根据运动学设计、控制系统和执行器类型等标准进行了系统分类。它采用的运动学分类是本研究特有的原始分类,并已应用于所有检查的模型。


























 京公网安备 11010802027423号
京公网安备 11010802027423号