International Journal of Intelligent Robotics and Applications Pub Date : 2023-06-02 , DOI: 10.1007/s41315-023-00283-1 Bin Ren , Jianwei Liu , Wanli Guan , Pengyu Ren
|
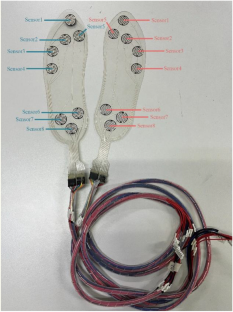
The gait phase recognition has some broad application prospects, such as lower limb exoskeleton (LLE). To accurately identify the gait phase in different locomotion modes according to gait patterns and corresponding gait characteristics, we define sets of gait phases and propose a gait phase recognition model using plantar pressure sensing signals. The gait phase recognition algorithm based on the multi-layer perceptron (MLP) is used to study the gait phase recognition in walking and running modes. The experimental results show that the gait phase recognition model can recognize the gait phase in different motion modes based on the plantar pressure sensing information. The gait phase recognition of multi-mode locomotion can provide sufficient control logic reference for the powered exoskeleton robot. Through the data of 1052 gait cycles of 4 participants in the experiment, the accuracy of gait recognition for walking mode is 93.9%, and the accuracy of gait recognition for flying state is 76.5%.
中文翻译:
基于多层感知器的足底压力测量系统多模式运动步态相位识别
步态相位识别具有广阔的应用前景,例如下肢外骨骼(LLE)。为了根据步态模式和相应的步态特征准确识别不同运动模式下的步态阶段,我们定义了一组步态阶段,并提出了一种使用足底压力传感信号的步态阶段识别模型。基于多层感知器(MLP)的步态相位识别算法用于研究步行和跑步模式下的步态相位识别。实验结果表明,该步态相位识别模型能够根据足底压力传感信息识别出不同运动模式下的步态相位。多模式运动的步态相位识别可以为动力外骨骼机器人提供充分的控制逻辑参考。


























 京公网安备 11010802027423号
京公网安备 11010802027423号