International Journal of Intelligent Robotics and Applications Pub Date : 2023-06-13 , DOI: 10.1007/s41315-023-00287-x Lin Zhang , Xianhua Zheng , Chenyu Wang , Lingling Su , Peixing Li , Yanzheng Zhao
|
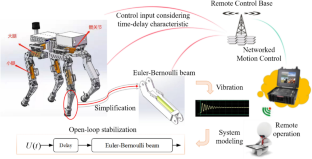
Remote control has been the most promising yet challenging problem in robotic manipulation. In this paper, the stabilization control problem of a quadruped robot’s manipulator is described as Euler–Bernoulli beam model. Considering time-delay characteristic of remote-control input or networked motion control input, the target system is presented as delay-wave equations. By formulating the equation into beam-transport cascade system without delay, predictor feedback is estimated. Then, the stabilization controller, which achieve the exponential stability, is proposed based on the derived predictor feedback. Both the stability and well-posedeness are proofed through mathematical analysis. Finally, the simulations are conducted and discussed. Results show the efficiency stability of proposed method.
中文翻译:
通过预测器反馈实现机器人欧拉-伯努利机械手的远程闭环稳定
远程控制一直是机器人操作中最有前途但最具挑战性的问题。在本文中,四足机器人机械手的稳定控制问题被描述为欧拉-伯努利梁模型。考虑远程控制输入或网络运动控制输入的时滞特性,将目标系统表示为时滞波动方程。通过将方程公式化为无延迟的光束传输级联系统,估计预测器反馈。然后,基于导出的预测器反馈,提出了实现指数稳定性的稳定控制器。通过数学分析证明了稳定性和适定性。最后,进行了仿真并进行了讨论。结果表明所提方法的效率稳定性。


























 京公网安备 11010802027423号
京公网安备 11010802027423号