Journal of Marine Science and Technology ( IF 2.6 ) Pub Date : 2023-07-07 , DOI: 10.1007/s00773-023-00940-x Kazuhisa Otsubo
|
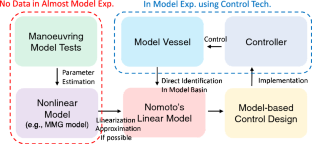
Nomoto’s linear model is always utilized in model-based steering control design for model experiments to analyze the steering dynamics and optimize the controllers using numerical tools. The effective identification of parameters for the free running model is important for reducing the time cost of model experiments. In this paper, a parameter identification method based on closed-loop responses using unity feedback is discussed. Unity feedback can transform the original dynamics of the model into the familiar 2nd-order mechanical mass-damper-spring system, which is convenient for analyzing the system. Although the identification of parameters based on closed-loop responses is a common technique in control engineering, few approaches using the free running model have been applied in ocean engineering. Given this motivations, parameter identification methods based on unity feedback responses are evaluated through numerical simulations and model experiments. From the results of this investigation, it is clear that noise in measurements and the initial yaw rate of the running model have detrimental impacts on the identified values.
中文翻译:
模型实验中基于统一反馈响应的转向控制参数辨识
野本的线性模型始终用于基于模型的转向控制设计中,用于模型实验,以分析转向动力学并使用数值工具优化控制器。自由运行模型参数的有效识别对于降低模型实验的时间成本具有重要意义。本文讨论了一种基于使用单位反馈的闭环响应的参数识别方法。统一反馈可以将模型的原始动力学转化为熟悉的二阶机械质量-阻尼器-弹簧系统,方便对系统进行分析。尽管基于闭环响应的参数识别是控制工程中的常用技术,但在海洋工程中应用自由运行模型的方法很少。鉴于这种动机,通过数值模拟和模型实验对基于统一反馈响应的参数识别方法进行了评估。从这项调查的结果来看,很明显,测量中的噪声和运行模型的初始偏航率对识别值有不利影响。


























 京公网安备 11010802027423号
京公网安备 11010802027423号