International Journal of Intelligent Robotics and Applications Pub Date : 2023-07-06 , DOI: 10.1007/s41315-023-00293-z Wentao Mei , Yongfeng Zheng , Yu Gu
|
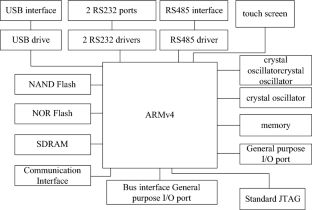
The complexity of industrial production line of non-integrated mobile industrial robot is high, which leads to the deviation of industrial robot trajectory and low working accuracy, which further affects the production progress. In order to improve the stability of industrial robots, the design of intelligent three-dimensional collaborative manufacturing platform for nonholonomic mobile industrial robots based on improved binocular vision is proposed. ARM controller, data transmission and communication module, PLC control module and PLC input and output wiring module are designed, and the four functional modules work in coordination to realize accurate perception of the working area. A binocular vision model based on texture image and 3D point cloud registration is constructed. The trajectory of nonholonomic mobile industrial robot is obtained by fuzzy function estimation and variational function, and the object posture is recognized. The intelligent 3D collaborative manufacturing platform of mobile industrial robot is designed by combining the intelligent 3D collaborative manufacturing technology. The test results show that the proposed method has better trajectory control effect, better sequencing performance and better robustness. It shows that this method can effectively control nonholonomic mobile industrial robots.
中文翻译:
基于改进双目视觉的非完整移动工业机器人智能3D协同制造平台设计
非集成移动工业机器人工业生产线复杂度较高,导致工业机器人运动轨迹存在偏差,工作精度低,进一步影响生产进度。为了提高工业机器人的稳定性,提出了基于改进双目视觉的非完整移动工业机器人智能三维协同制造平台的设计。设计了ARM控制器、数据传输与通讯模块、PLC控制模块和PLC输入输出接线模块,四个功能模块协同工作,实现工作区域的精确感知。构建了基于纹理图像和3D点云配准的双目视觉模型。通过模糊函数估计和变分函数得到非完整移动工业机器人的运动轨迹,并识别物体姿态。结合智能3D协同制造技术设计了移动工业机器人智能3D协同制造平台。测试结果表明,该方法具有更好的轨迹控制效果、更好的排序性能和更好的鲁棒性。表明该方法能够有效控制非完整移动工业机器人。测试结果表明,该方法具有更好的轨迹控制效果、更好的排序性能和更好的鲁棒性。表明该方法能够有效控制非完整移动工业机器人。测试结果表明,该方法具有更好的轨迹控制效果、更好的排序性能和更好的鲁棒性。表明该方法能够有效控制非完整移动工业机器人。


























 京公网安备 11010802027423号
京公网安备 11010802027423号