International Journal of Intelligent Robotics and Applications Pub Date : 2023-07-08 , DOI: 10.1007/s41315-023-00291-1 M. Muralidharan , Parvesh Saini , Preshit Ameta , I. A. Palani
|
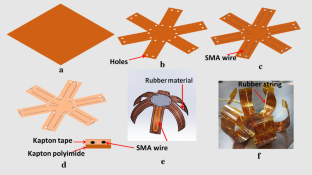
A novel flexible polyimide-based soft jellyfish robot actuated by shape memory alloy (SMA) was fabricated and the pulse and recovery process of the jellyfish has been mimicked. The existing SMA wire-embedded tentacle fabrication technique is a time-consuming and human-tiring process. The proposed structure is novel, cost-effective, and easy to fabricate with very less time consumption compared to conventional mold-based methods. The behavior of the proposed jellyfish structure has been investigated with varying SMA wire diameters and frequencies. The jellyfish tentacle displacement and velocity during mimicking were measured. The temperature modeling of SMA embedded structure and deflection modeling using beam bending theory has been performed. In addition, a preliminary simulation of the jellyfish mimicking has been carried out in Ansys Fluent and the thrust force has been evaluated. The results show that the proposed method can be successfully applied to mimic jellyfish locomotion and extended to underwater applications. The initial prototype has been developed with an onboard camera module and sonar sensor for object detection application with a watertight PDMS bell structure.
中文翻译:
仿生软水母机器人:由形状记忆合金驱动的新型聚酰亚胺结构
制造了一种由形状记忆合金(SMA)驱动的新型柔性聚酰亚胺软水母机器人,并模仿了水母的脉冲和恢复过程。现有的 SMA 线嵌入触手制造技术是一个耗时且费力的过程。与传统的基于模具的方法相比,所提出的结构新颖、经济高效且易于制造,且耗时少得多。所提出的水母结构的行为已经通过不同的 SMA 线直径和频率进行了研究。测量了水母触手模仿过程中的位移和速度。使用梁弯曲理论对 SMA 嵌入结构进行了温度建模和挠度建模。此外,在Ansys Fluent中对水母模仿进行了初步模拟,并评估了推力。结果表明,该方法可以成功应用于模拟水母运动并扩展到水下应用。最初的原型采用机载摄像头模块和声纳传感器开发,用于具有防水 PDMS 钟形结构的物体检测应用。


























 京公网安备 11010802027423号
京公网安备 11010802027423号