Genetic Programming and Evolvable Machines ( IF 2.6 ) Pub Date : 2023-07-22 , DOI: 10.1007/s10710-023-09457-z Marlen Meza-Sánchez , M. C. Rodríguez-Liñán , Eddie Clemente , Leonardo Herrera
|
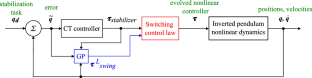
The development of control laws for underactuated mechanical systems with pendulum-like behaviors is of paramount importance due to their use in the modeling of more complex systems and other challenging tasks. The underactuated feature describes constraints in the maneuverability and capabilities of a mechanical system with the advantage of offering less energy consumption. In this work, a novel methodology for solving the automation of evolved nonlinear controllers for the swing-up phase of switching control laws for underactuated inverted pendulums is proposed. Automatic synthesis of linear controllers with optimal performance applied to linear systems modeled as transfer functions is a forward leap proposed by Koza in 2003. Our proposed approach introduces the nonlinear nature within the automated construction of a set of swing-up controllers integrating an evolutionary process based on Genetic Programming (GP). The presented framework is based on an analytic behaviorist setup that merges Control Theory (CT) with GP. CT is applied to formulate the mathematical description of the problem and the design of the fitness function that guides the automated synthesis; GP is implemented as an evolutionary engine for the construction of the solutions. The advantage is that the symbolic feature of GP is exploited to develop large sets of nonlinear controllers that can be further studied with analytic tools from the CT approach. The proposed framework is applied to an underactuated two-link inverted pendulum giving a set of 13,590 evolved nonlinear swing-up controllers with the same and better fitness value than a state-of-the-art human-made design.
中文翻译:
欠驱动倒立摆稳定任务的摆动控制器的进化设计
具有类似钟摆行为的欠驱动机械系统的控制律的开发至关重要,因为它们可用于更复杂的系统和其他具有挑战性的任务的建模。欠驱动特征描述了机械系统的可操作性和能力的限制,其优点是能耗较少。在这项工作中,提出了一种新的方法来解决欠驱动倒立摆开关控制律摆动阶段的演化非线性控制器的自动化问题。将具有最佳性能的线性控制器自动合成应用于建模为传递函数的线性系统是 Koza 在 2003 年提出的一个向前飞跃。我们提出的方法引入了一组摆动控制器的自动构造中的非线性特性,该控制器集成了基于遗传编程(GP)的进化过程。所提出的框架基于将控制理论 (CT) 与 GP 相结合的分析行为主义设置。应用CT来制定问题的数学描述以及指导自动合成的适应度函数的设计;GP 作为构建解决方案的进化引擎来实现。优点是利用 GP 的符号特征来开发大量非线性控制器,可以使用 CT 方法的分析工具进一步研究这些控制器。所提出的框架应用于欠驱动两连杆倒立摆,给出一组 13 个,


























 京公网安备 11010802027423号
京公网安备 11010802027423号