Mathematics of Control, Signals, and Systems ( IF 1.2 ) Pub Date : 2023-07-29 , DOI: 10.1007/s00498-023-00363-4 V. Maksimov
|
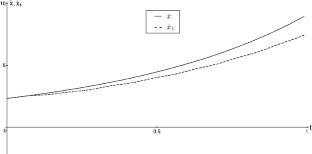
We study the problem of active reduction of the influence of a disturbance on the output of a linear controlled system. The problem is studied on a finite time interval. We consider a system of linear differential equations under the action of an unknown disturbance and a control. The problem consists in constructing an algorithm for forming a control that reduces the disturbance on the basis of inaccurate measurements of a part of phase coordinates of the system. This algorithm should form a feedback control such that the trajectory of the given system influenced by an unknown disturbance tracks the trajectory of the reference system. The latter system is described by the same differential equations but with zero control and disturbance. We present two algorithms for solving this problem. These algorithms are robust with respect to informational noises and computational errors.
中文翻译:
线性动力系统减扰问题的稳定解
我们研究主动减少扰动对线性控制系统输出的影响的问题。该问题是在有限的时间间隔内研究的。我们考虑未知扰动和控制作用下的线性微分方程组。问题在于构建一种算法,用于形成一种控制,以减少基于系统部分相位坐标的不准确测量的干扰。该算法应形成反馈控制,使得受未知扰动影响的给定系统的轨迹跟踪参考系统的轨迹。后一个系统由相同的微分方程描述,但控制和干扰为零。我们提出了两种算法来解决这个问题。


























 京公网安备 11010802027423号
京公网安备 11010802027423号