Journal of Combinatorial Optimization ( IF 1 ) Pub Date : 2023-08-04 , DOI: 10.1007/s10878-023-01071-0 Changliang Xu , Hao Xu , Zhong Yang , Jiying Wu , Luwei Liao , Qiuyan Zhang
|
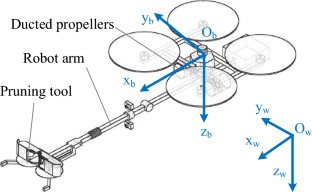
Power transmission lines require efficient and reliable tree pruning to maintain their operation. This paper presents an adaptive Alternating Direction Method of Multipliers (ADMM)-based fast Model Predictive Control (MPC) for aerial tree pruning robots to address low operating efficiency and high labor costs. The proposed control strategy leverages MPC, a modern control method proven effective in complex systems, including aerial robots, to handle the challenges of attitude and position control during tree pruning operations. The adaptive ADMM algorithm is employed to solve constrained Quadratic Programming (QP) problems in real-time, enabling the robot to respond quickly to dynamic changes and maintain stability. Designed to perform real-time calculations on embedded computers with limited computing power, the control strategy is well-suited for implementation on aerial pruning robots. Improved operational capabilities, such as faster job site access, larger working space, and fossil fuel-free operation, result in increased efficiency and reduced labor costs. The paper covers the dynamic model of the pruning robot, the fast MPC control scheme, the adaptive ADMM for solving the QP problem, and the successful simulation and experimental implementation of the proposed control strategy on the aerial pruning robot.
中文翻译:
基于交替方向乘子法的空中树木修剪机器人快速模型预测控制
输电线路需要高效可靠的树木修剪来维持其运行。本文提出了一种基于自适应交替方向乘子法(ADMM)的快速模型预测控制(MPC),用于空中树木修剪机器人,以解决运行效率低和劳动力成本高的问题。所提出的控制策略利用 MPC(一种在包括空中机器人在内的复杂系统中被证明有效的现代控制方法)来应对树木修剪操作期间的姿态和位置控制挑战。采用自适应ADMM算法实时求解约束二次规划(QP)问题,使机器人能够快速响应动态变化并保持稳定性。设计用于在计算能力有限的嵌入式计算机上进行实时计算,该控制策略非常适合在空中修剪机器人上实施。改进的操作能力,例如更快地进入作业现场、更大的工作空间和无化石燃料操作,可以提高效率并降低劳动力成本。本文涵盖了修剪机器人的动态模型、快速 MPC 控制方案、解决 QP 问题的自适应 ADMM,以及所提出的控制策略在空中修剪机器人上的成功仿真和实验实现。


























 京公网安备 11010802027423号
京公网安备 11010802027423号