Journal of Computer and Systems Sciences International ( IF 0.6 ) Pub Date : 2023-09-30 , DOI: 10.1134/s1064230723020193 N. E. Zubov , E. Yu. Zybin , A. V. Lapin
|
Abstract
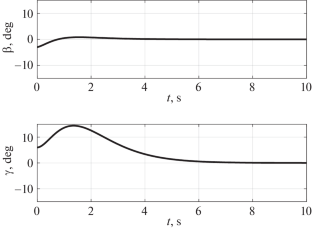
For a linearized fourth-order model describing the lateral motion of an aircraft with two controls, the stabilizing control laws analytical expressions are obtained at the lack of measurements of slip and roll angles. Analytical synthesis is based on a new approach of solving the problem of control by output. In contrast to the traditional Van der Woude approach using multilevel decomposition, the proposed approach is applicable to a wide class of systems with total dimension of control and observation vectors not exceeding the dimension of state vector. A compact formula is presented that determines the matrix of controller by output for a fourth-order dynamic system with two inputs and two outputs, provided that the indices of controllability and observability are not equal to each other. The results of simulation of control processes are given on the example of stabilization of the lateral motion of a hypothetical aircraft.
中文翻译:
在缺乏滑移角和侧倾角测量的情况下通过输出进行飞机横向运动控制的分析综合
摘要
对于描述具有两个控制的飞机横向运动的线性四阶模型,在缺乏滑移角和侧倾角测量的情况下获得稳定控制律解析表达式。分析综合基于解决输出控制问题的新方法。与使用多级分解的传统 Van der Woude 方法相比,该方法适用于控制向量和观测向量的总维数不超过状态向量维数的广泛系统。对于具有两个输入和两个输出的四阶动态系统,给出了一个紧凑的公式,该公式通过输出确定控制器矩阵,前提是可控性和可观性指数彼此不相等。


























 京公网安备 11010802027423号
京公网安备 11010802027423号