当前位置:
X-MOL 学术
›
J. Comput. Syst. Sci. Int.
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
On the Skating Motion of a Robot Controlled by an Internal Flywheel
Journal of Computer and Systems Sciences International ( IF 0.6 ) Pub Date : 2023-10-01 , DOI: 10.1134/s1064230723030073 L. A. Klimina , E. S. Shalimova
中文翻译:

内飞轮控制机器人滑行运动研究
更新日期:2023-10-01
Journal of Computer and Systems Sciences International ( IF 0.6 ) Pub Date : 2023-10-01 , DOI: 10.1134/s1064230723030073 L. A. Klimina , E. S. Shalimova
|
Abstract
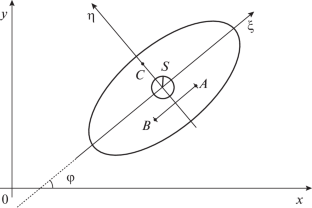
The motion of an axisymmetric robot controlled by a flywheel mounted on it is considered. It is assumed that the body of the robot is in contact with the plane at three points, while the force of dry anisotropic friction acts at two points, and at the third point the friction is isotropic. The control of the internal flywheel, which ensures the movement of the object in the given direction, is built. The dependence of the average velocity of the center of mass of the robot on the parameters of the system is studied.
中文翻译:
内飞轮控制机器人滑行运动研究
摘要
考虑由安装在其上的飞轮控制的轴对称机器人的运动。假设机器人的身体在三个点与平面接触,而干各向异性摩擦力作用在两个点,在第三点摩擦力是各向同性的。建立了内部飞轮的控制,确保物体沿给定方向运动。研究了机器人质心平均速度对系统参数的依赖性。


























 京公网安备 11010802027423号
京公网安备 11010802027423号