Journal of Computer and Systems Sciences International ( IF 0.6 ) Pub Date : 2023-10-01 , DOI: 10.1134/s1064230723040056 A. E. Golubev
|
Abstract
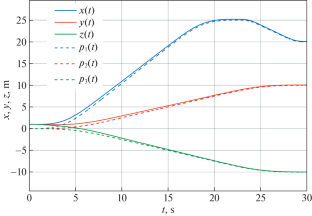
The problem of the stabilization of programmed trajectories of mechanical systems, taking the constraints on the values of generalized coordinates, velocities, and accelerations into account, is considered. The control is built using the backstepping method in combination with the use of logarithmic Lyapunov barrier functions. The stabilizing feedbacks obtained in this study, in contrast to similar known results, do not lead to an unlimited increase in the values of the control variables when the state variables of the system approach the boundary values. As an example, the problem of constructing and stabilizing the trajectory of the spatial motion of an underwater vehicle is considered.
中文翻译:
受约束机械系统的程序化运动的稳定性
摘要
考虑了机械系统编程轨迹的稳定性问题,考虑了广义坐标、速度和加速度值的约束。该控制是使用反步法并结合对数李雅普诺夫势垒函数来构建的。与类似的已知结果相比,本研究中获得的稳定反馈不会导致当系统的状态变量接近边界值时控制变量的值无限增加。例如,考虑构建和稳定水下航行器空间运动轨迹的问题。


























 京公网安备 11010802027423号
京公网安备 11010802027423号