International Journal of Intelligent Robotics and Applications Pub Date : 2023-10-14 , DOI: 10.1007/s41315-023-00300-3 Sindhu Radhakrishnan , Wail Gueaieb
|
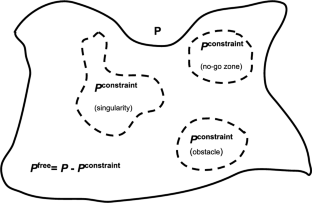
Autonomous robotic path planning in partially known environments, such as warehouse robotics, deals with static and dynamic constraints. Static constraints include stationary obstacles, robotic and environmental limitations. Dynamic constraints include humans, robots and dis/appearance of anticipated dangers, such as spills. Path planning consists of two steps: First, a path between the source and target is generated. Second, path segments are evaluated for constraint violation. Sampling algorithms trade memory for maximal map representation. Optimization algorithms stagnate at non-optimal solutions. Alternatively, detailed grid-maps view terrain/structure as expensive memory costs. The open problem is thus to represent only constraint-free, navigable regions and generating anticipatory/reactive paths to combat new constraints. To solve this problem, a Constraint-Free Discretized Manifolds-based Path Planner (CFDMPP) is proposed in this paper. The algorithm’s first step focuses on maximizing map knowledge using manifolds. The second uses homology and homotopy classes to compute paths. The former constructs a representation of the navigable space as a manifold, which is free of apriori known constraints. Paths on this manifold are constraint-free and do not have to be explicitly evaluated for constraint violation. The latter handles new constraint knowledge that invalidate the original path. Using homology and homotopy, path classes can be recognized and avoided by tuning a design parameter, resulting in an alternative constraint-free path. Path classes on the discretized constraint-free manifold characterize numerical uniqueness of paths around constraints. This designation is what allows path class characterization, avoidance, and querying of a new path class (multiple classes with tuning), even when constraints are simply anticipatory.
中文翻译:
基于无约束离散流形的路径规划器
部分已知环境(例如仓库机器人)中的自主机器人路径规划处理静态和动态约束。静态约束包括固定障碍物、机器人和环境限制。动态约束包括人类、机器人以及预期危险的消失/出现,例如泄漏。路径规划包括两个步骤:首先,生成源和目标之间的路径。其次,评估路径段是否违反约束。采样算法用内存换取最大的地图表示。优化算法在非最佳解决方案上停滞不前。或者,详细的网格地图将地形/结构视为昂贵的内存成本。因此,开放问题是仅表示无约束的可导航区域,并生成预期/反应路径来对抗新的约束。为了解决这个问题,本文提出了一种基于无约束离散流形的路径规划器(CFDMPP)。该算法的第一步重点是使用流形最大化地图知识。第二个使用同源和同伦类来计算路径。前者将可导航空间表示为流形,不受先验已知的约束。该流形上的路径是无约束的,并且不必显式评估是否违反约束。后者处理使原始路径无效的新约束知识。使用同源性和同伦性,可以通过调整设计参数来识别和避免路径类别,从而产生替代的无约束路径。离散无约束流形上的路径类表征约束周围路径的数值唯一性。即使约束只是预期的,此指定也允许对新路径类(具有调整的多个类)进行路径类表征、避免和查询。


























 京公网安备 11010802027423号
京公网安备 11010802027423号