Journal of Scheduling ( IF 2 ) Pub Date : 2023-11-06 , DOI: 10.1007/s10951-023-00792-8 Hongkai Fan , Dong Li , Bo Ouyang , Zhi Yan , Yaonan Wang
|
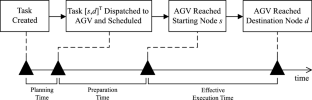
Automated guided vehicles (AGVs) are driverless robotic vehicles that pick up and deliver materials. Finding ways to improve efficiency while preventing deadlocks is a core issue in designing AGV systems. In this paper, we propose an approach to improve the efficiency of traditional deadlock-free scheduling algorithms. Typically, AGVs have to travel to designated starting locations from their parking locations to execute tasks, the time required for which is referred to as preparation time. The proposed approach aims at reducing the preparation time by predicting the starting locations for future tasks and then making decisions on whether to send an AGV to the predicted starting location of the upcoming task, thus reducing the time spent waiting for an AGV to arrive at the starting location after the upcoming task is created. Cases in which wrong predictions have been made are also addressed in the proposed method. Simulation results show that the proposed method significantly improves efficiency, up to 20–30% as compared with traditional methods.
中文翻译:
通过任务预测改进多 AGV 系统的调度
自动导引车 (AGV) 是用于拾取和运送物料的无人驾驶机器人车辆。寻找提高效率的同时防止死锁的方法是设计AGV系统的核心问题。在本文中,我们提出了一种提高传统无死锁调度算法效率的方法。通常,AGV必须从其停车位置行驶到指定的起始位置来执行任务,所需的时间称为准备时间。所提出的方法旨在通过预测未来任务的起始位置来减少准备时间,然后决定是否将 AGV 发送到即将到来的任务的预测起始位置,从而减少等待 AGV 到达目的地所花费的时间。创建即将到来的任务后的起始位置。所提出的方法还解决了做出错误预测的情况。仿真结果表明,该方法显着提高了效率,比传统方法提高了20%~30%。


























 京公网安备 11010802027423号
京公网安备 11010802027423号