Automatic Control and Computer Sciences Pub Date : 2023-11-07 , DOI: 10.3103/s0146411623050097 Brijesh Patel , Yan Cen Lin , Hao Jian Eugene Tong , Chao-Lung Yang , Ching-Yuan Chang , Po Ting Lin
|
Abstract
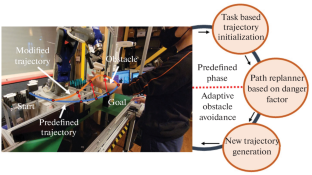
Robot arms have been widely used in various production factories. They are able to complete desired tasks, such as picking and placing, with good repeatability. However, robots cannot completely replace human workers due to many different reasons. Human workers can complete delicate tasks more effectively with their skillful hands. Robots could be human workers helpers in terms of picking and placing items, delivering items to humans, lifting items for humans, etc. However, the risk of harming human workers greatly increases as the robots get closer to them. Recently, researchers began to develop advanced technologies for human–robot collaboration. In this paper, a novel system will be presented. A spatial-temporal graph network was used to identify human motions, and the random forest model was used to evaluate the danger factor between the human and the robot in the robot’s moving path. A Lagrangian minimization was used to determine a new robot’s moving trajectory to keep a safe distance from humans. The safety distance could be adaptively shortened as the robot moves closer to humans for specific man–robot collaboration missions.
中文翻译:
具有自适应避障功能的机器人手臂路径规划,实现人机协作
摘要
机械臂已广泛应用于各生产工厂。他们能够以良好的可重复性完成所需的任务,例如拾取和放置。然而,由于多种原因,机器人并不能完全取代人类工人。人类工人可以用灵巧的双手更有效地完成精细的任务。机器人可以成为人类工人的帮手,例如拾取和放置物品、向人类运送物品、为人类搬运物品等。然而,随着机器人距离人类工人越来越近,伤害人类工人的风险就会大大增加。最近,研究人员开始开发用于人机协作的先进技术。在本文中,将提出一种新颖的系统。利用时空图网络识别人体运动,利用随机森林模型评估机器人运动路径中人与机器人之间的危险因素。使用拉格朗日最小化来确定新机器人的移动轨迹,以与人类保持安全距离。当机器人在执行特定的人机协作任务时靠近人类时,安全距离可以自适应缩短。


























 京公网安备 11010802027423号
京公网安备 11010802027423号