Journal of Computer and Systems Sciences International ( IF 0.6 ) Pub Date : 2023-11-11 , DOI: 10.1134/s1064230723050088 D. N. Ibragimov , A. N. Sirotin
|
Abstract
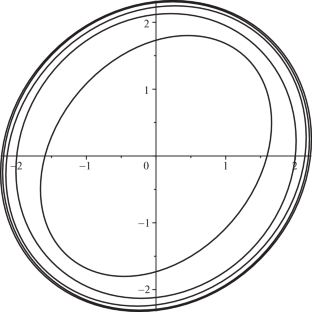
We consider the problem of constructing reachable sets, i.e., sets of terminal states into which a system can be transferred from the origin in a fixed time, and 0-controllability sets, i.e., sets of initial states, from which a system can be transferred to the origin in a fixed time, for stationary linear discrete systems with a total control constraint. The representation of reachable and 0-controllable sets as linear transformations of superellipsoidal sets of finite and infinite dimensions is proved. A constructive method for describing the desired sets based on the apparatus of supporting half-planes is proposed, including for the limit sets of reachability and controllability. In the case of Euclidean spaces, the description is obtained explicitly. Examples are given. For a three-dimensional satellite motion control system in a near-circular orbit, reachability sets are modeled.
中文翻译:
具有总控制约束的稳态线性离散系统有界可控性集的一些性质
摘要
我们考虑构造可达集(即系统可以在固定时间内从原点转移到的终止状态集)和0可控性集(即系统可以从其转移到的初始状态集)的问题对于具有总控制约束的平稳线性离散系统,在固定时间内回到原点。证明了可达集和0可控集作为有限维和无限维超椭球集的线性变换的表示。提出了一种基于半平面支撑装置的描述期望集合的构造方法,包括可达性和可控性的极限集合。在欧几里得空间的情况下,描述是明确获得的。给出了例子。针对近圆轨道上的三维卫星运动控制系统,对可达集进行建模。


























 京公网安备 11010802027423号
京公网安备 11010802027423号