当前位置:
X-MOL 学术
›
IET Radar Sonar Navig.
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
A fully-automatic side-scan sonar simultaneous localization and mapping framework
IET Radar Sonar and Navigation ( IF 1.7 ) Pub Date : 2023-11-13 , DOI: 10.1049/rsn2.12500 Jun Zhang 1 , Yiping Xie 1 , Li Ling 1 , John Folkesson 1
IET Radar Sonar and Navigation ( IF 1.7 ) Pub Date : 2023-11-13 , DOI: 10.1049/rsn2.12500 Jun Zhang 1 , Yiping Xie 1 , Li Ling 1 , John Folkesson 1
Affiliation
|
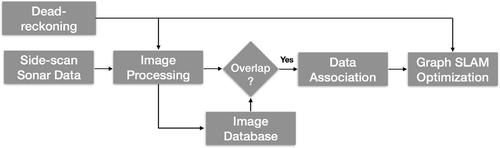
Side-scan sonar is a lightweight acoustic sensor that is frequently deployed on autonomous underwater vehicles (AUVs) to provide high-resolution seafloor images. However, using side-scan images to perform simultaneous localization and mapping (SLAM) remains a challenge when there is a lack of 3D bathymetric information and discriminant features in the side-scan images. To tackle this, the authors propose a feature-based SLAM framework using side-scan sonar, which is able to automatically detect and robustly match keypoints between paired side-scan images. The authors then use the detected correspondences as constraints to optimise the AUV pose trajectory. The proposed method is evaluated on real data collected by a Hugin AUV, using as a ground truth reference both manually-annotated keypoints and a 3D bathymetry mesh from multibeam echosounder (MBES). Experimental results demonstrate that this approach is able to reduce drifts from the dead-reckoning system. The framework is made publicly available for the benefit of the community.
中文翻译:

全自动侧扫声呐同步定位建图框架
侧扫声纳是一种轻型声学传感器,经常部署在自主水下航行器 (AUV) 上,以提供高分辨率海底图像。然而,当侧扫描图像中缺乏 3D 测深信息和判别特征时,使用侧扫描图像执行同步定位和建图 (SLAM) 仍然是一个挑战。为了解决这个问题,作者提出了一种使用侧扫描声纳的基于特征的 SLAM 框架,该框架能够自动检测并鲁棒地匹配成对侧扫描图像之间的关键点。然后,作者使用检测到的对应关系作为约束来优化 AUV 位姿轨迹。所提出的方法根据 Hugin AUV 收集的真实数据进行评估,使用手动注释的关键点和多波束回声测深仪 (MBES) 的 3D 测深网格作为地面实况参考。实验结果表明,这种方法能够减少航位推算系统的漂移。该框架是为了社区的利益而公开提供的。
更新日期:2023-11-17
中文翻译:
全自动侧扫声呐同步定位建图框架
侧扫声纳是一种轻型声学传感器,经常部署在自主水下航行器 (AUV) 上,以提供高分辨率海底图像。然而,当侧扫描图像中缺乏 3D 测深信息和判别特征时,使用侧扫描图像执行同步定位和建图 (SLAM) 仍然是一个挑战。为了解决这个问题,作者提出了一种使用侧扫描声纳的基于特征的 SLAM 框架,该框架能够自动检测并鲁棒地匹配成对侧扫描图像之间的关键点。然后,作者使用检测到的对应关系作为约束来优化 AUV 位姿轨迹。所提出的方法根据 Hugin AUV 收集的真实数据进行评估,使用手动注释的关键点和多波束回声测深仪 (MBES) 的 3D 测深网格作为地面实况参考。实验结果表明,这种方法能够减少航位推算系统的漂移。该框架是为了社区的利益而公开提供的。


























 京公网安备 11010802027423号
京公网安备 11010802027423号