Optimization and Engineering ( IF 2.1 ) Pub Date : 2023-11-23 , DOI: 10.1007/s11081-023-09865-1 Prabhat Kumar
|
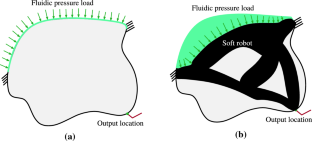
Demands for pneumatic-driven soft robots are constantly rising for various applications. However, they are often designed manually due to the lack of systematic methods. Moreover, design-dependent characteristics of pneumatic actuation pose distinctive challenges. This paper provides a compact MATLAB code, named SoRoTop, and its various extensions for designing pneumatic-driven soft robots using topology optimization. The code uses the method of moving asymptotes as the optimizer and builds upon the approach initially presented in Kumar et al. (Struct Multidiscip Optim 61(4):1637–1655, 2020). The pneumatic load is modeled using Darcy’s law with a conceptualized drainage term. Consistent nodal loads are determined from the resultant pressure field using the conventional finite element approach. The robust formulation is employed, i.e., the eroded and blueprint design descriptions are used. A min–max optimization problem is formulated using the output displacements of the eroded and blueprint designs. A volume constraint is imposed on the blueprint design, while the eroded design is used to apply a conceptualized strain energy constraint. The latter constraint aids in attaining optimized designs that can endure the applied load without compromising their performance. Sensitivities required for optimization are computed using the adjoint-variable method. The code is explained in detail, and various extensions are also presented. It is structured into pre-optimization, MMA optimization, and post-optimization operations, each of which is comprehensively detailed. The paper also illustrates the impact of load sensitivities on the optimized designs. SoRoTop is provided in “Appendix A” and is available with extensions in the supplementary material and publicly at https://github.com/PrabhatIn/SoRoTop.
中文翻译:
SoRoTop:拓扑优化搭车指南 MATLAB 代码,适用于设计相关的气动驱动软机器人
各种应用对气动驱动软机器人的需求不断增长。然而,由于缺乏系统的方法,它们往往是手工设计的。此外,气动驱动的设计相关特性带来了独特的挑战。本文提供了一个名为SoRoTop的紧凑 MATLAB 代码及其各种扩展,用于使用拓扑优化设计气动驱动的软机器人。该代码使用移动渐近线的方法作为优化器,并建立在 Kumar 等人最初提出的方法的基础上。(结构多学科优化 61(4):1637–1655, 2020)。气动载荷使用达西定律和概念化的排水项进行建模。使用传统的有限元方法根据合成压力场确定一致的节点载荷。采用稳健的公式,即使用侵蚀和蓝图设计描述。使用侵蚀和蓝图设计的输出位移来制定最小-最大优化问题。对蓝图设计施加体积约束,而侵蚀设计用于应用概念化的应变能约束。后一个约束有助于实现优化设计,使其能够承受所施加的负载而不影响其性能。优化所需的灵敏度是使用伴随变量方法计算的。代码被详细解释,并且还提供了各种扩展。它分为优化前、MMA优化和优化后操作,每一个操作都有详细的介绍。本文还说明了负载敏感性对优化设计的影响。SoRoTop在“附录 A”中提供,可通过补充材料中的扩展以及在 https://github.com/PrabhatIn/SoRoTop 上公开获取。


























 京公网安备 11010802027423号
京公网安备 11010802027423号