Machine Vision and Applications ( IF 3.3 ) Pub Date : 2023-11-28 , DOI: 10.1007/s00138-023-01488-x Chuyuan Hong , Meiling Zhong , Zhaoqian Jia , Changjiang You , Zhiguo Wang
|
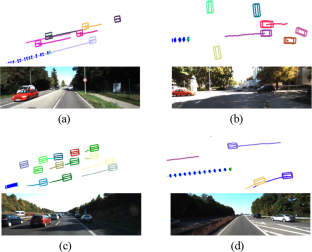
The assumption of a static environment is a prerequisite for most of the traditional visual simultaneous localization and mapping (v-SLAM) algorithms, which limits their widespread application in a dynamic environment. Furthermore, in many applications such as autonomous driving, robot collaboration and AR/VR, it is necessary to track the moving objects in the environment. In this work, we propose a v-SLAM method that can effectively track multiple objects in dynamic environments by integrating a 3D object detection thread into the ORB-SLAM2 framework. The dynamic objects were detected and tracked in three steps. Firstly, 3D object detection was performed on the current frame, and the 3D bounding box was projected into a bird's-eye view. Secondly, an association for the object is made based on the motion state of the object and the bounding box in the bird’s-eye view. Thirdly, we track the object and remove feature points corresponding to the dynamic region. In addition, we set up a multi-view constraint adjustment for static objects to jointly optimize the pose of the camera, object, and map point. Experiments have been conducted on the KITTI-odom and KITTI-raw datasets. The performance of our method was verified in challenging scenarios. We demonstrate that dynamic object tracking not only provides useful information for scene understanding, but also help to improve camera tracking.
中文翻译:
室外环境下移动车辆跟踪的立体视觉SLAM
静态环境的假设是大多数传统视觉同步定位与建图(v-SLAM)算法的先决条件,这限制了它们在动态环境中的广泛应用。此外,在自动驾驶、机器人协作、AR/VR等许多应用中,都需要跟踪环境中的移动物体。在这项工作中,我们提出了一种 v-SLAM 方法,通过将 3D 对象检测线程集成到 ORB-SLAM2 框架中,可以有效地跟踪动态环境中的多个对象。动态物体的检测和跟踪分三个步骤。首先,对当前帧进行3D物体检测,并将3D边界框投影到鸟瞰图上。其次,根据鸟瞰图中物体的运动状态和边界框对物体进行关联。第三,我们跟踪目标并删除与动态区域相对应的特征点。此外,我们针对静态物体设置了多视图约束调整,以联合优化相机、物体和地图点的位姿。在 KITTI-odom 和 KITTI-raw 数据集上进行了实验。我们的方法的性能在具有挑战性的场景中得到了验证。我们证明动态对象跟踪不仅为场景理解提供有用的信息,而且有助于改进相机跟踪。


























 京公网安备 11010802027423号
京公网安备 11010802027423号