Automatic Control and Computer Sciences Pub Date : 2023-11-27 , DOI: 10.3103/s0146411623060032 Nasri Boualem , Guessoum Abderrezak , Mostefai Lotfi , Bensikaddour El habib , Hamdadou Nabil , Ghoul Abdelhamid , Adnane Akram
|
Abstract
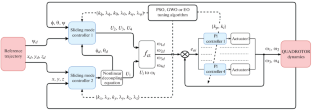
Metaheuristic optimization techniques are a powerful tool to decide the optimal gains for underactuated systems such as quadrotors, considering the multiple controllers involved in the inner and outer loops of the system. This paper deals with the evaluation of performance of the set of controllers (PI and SMC) set by three optimization methods: particle swarm optimization (PSO), grey wolf optimization (GWO), and equilibrium optimization (EO). The disparity of the control gains obtained during the optimization is a sign of the distinction between performance reached by each controller. The proposed study investigates this difference through a robustness test by gradually including faults to the quadrotor actuators. We observed degradation in the agility of quadrotor (stabilization of altitude and attitude) for the faulty case; however, the three controllers showed different tolerances to the fault. The simulation results show that the parameters optimized by EO algorithm, outperform both the PSO and the GWO algorithm, especially for the considered unfavorable cases.
中文翻译:
故障执行器下 4X Flyer 的优化内环和外环控制器评估
摘要
考虑到系统内环和外环涉及的多个控制器,元启发式优化技术是决定欠驱动系统(例如四旋翼飞行器)最佳增益的强大工具。本文通过三种优化方法来评估控制器组(PI 和 SMC)的性能:粒子群优化(PSO)、灰狼优化(GWO)和平衡优化(EO)。优化过程中获得的控制增益的差异是每个控制器所达到的性能之间差异的标志。拟议的研究通过稳健性测试来研究这种差异,逐步将四旋翼执行器的故障纳入其中。我们观察到故障情况下四旋翼飞行器的敏捷性(高度和姿态的稳定性)下降;然而,三个控制器对故障的容忍度不同。仿真结果表明,EO算法优化的参数优于PSO和GWO算法,特别是对于考虑不利情况的情况。


























 京公网安备 11010802027423号
京公网安备 11010802027423号