Multibody System Dynamics ( IF 3.4 ) Pub Date : 2023-11-30 , DOI: 10.1007/s11044-023-09951-3 AliAsghar MohammadiNasrabadi , John McPhee
|
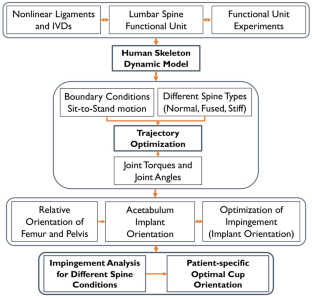
The traditional Lewinnek safe zone used for Total-Hip Arthroplasty (THA) surgery has been found to be inadequate, as dissatisfaction rates have risen after this surgery. It is evident that spinopelvic parameters and spine stiffness, factors that have been overlooked previously, must be taken into account for optimal surgical outcomes. In this paper, a novel predictive dynamic modeling approach was proposed to address this issue. This approach involved the development of a multibody model of a human that contained nonlinear spinal elements, which was validated by comparing it to literature in-vitro experiments and conducting a motion-capture experiment. To simulate human sit-to-stand motion, this model was employed with an optimal control approach based on trajectory optimization. Human joint angles were extracted from conducted simulations of different scenarios: normal, fused, and stiff spines. It was found that spine stiffness had a significant effect on lower-limb motion and the risk of implant impingement. Different scenarios of spine stiffness were examined, such as different levels of spinal fusion or an anatomically stiff spine. The optimal acetabular-cup orientation was calculated based on implant-impingement criteria using predicted motions for different spinal-condition scenarios, and the results compared to the clinically recommended orientation values for the same categories of patients. Our preliminary optimization suggests increasing the anteversion-cup angle from \(23 ^{\circ }\) (normal spine) to \(29 ^{\circ }\) for an anatomically stiff spine. For fused spines, the angle should fall within the range of 27–38∘, depending on the level of fusion. This research is the first of its kind to examine spine flexibility in different scenarios and its impact on lower-limb motion. The findings of this paper could help improve THA surgical planning and reduce the risk of hip impingement or dislocation after THA.
中文翻译:
使用受脊柱刚度影响的下肢动力学参数预测分析,初步优化全髋关节置换术中的杯植入物方向
人们发现用于全髋关节置换术 (THA) 手术的传统 Lewinnek 安全区是不够的,因为手术后不满意率上升。显然,为了获得最佳手术结果,必须考虑脊柱骨盆参数和脊柱刚度这些以前被忽视的因素。在本文中,提出了一种新颖的预测动态建模方法来解决这个问题。这种方法涉及开发包含非线性脊柱元件的人体多体模型,通过将其与文献体外实验进行比较并进行动作捕捉实验来验证该模型。为了模拟人类从坐到站的运动,该模型采用了基于轨迹优化的最优控制方法。人体关节角度是从不同场景的模拟中提取的:正常、融合和僵硬的脊柱。研究发现,脊柱僵硬对下肢运动和植入物撞击的风险有显着影响。检查了脊柱僵硬的不同情况,例如不同程度的脊柱融合或解剖学上僵硬的脊柱。最佳髋臼杯方向是根据植入物撞击标准使用不同脊柱状况情况下的预测运动来计算的,并将结果与同类患者的临床推荐方向值进行比较。我们的初步优化建议将前倾角从\(23 ^{\circ }\)(正常脊柱)增加到\(29 ^{\circ }\),以实现解剖学上僵硬的脊柱。对于融合的脊柱,角度应在 27–38 ∘范围内,具体取决于融合程度。这项研究是同类研究中第一个研究不同情况下脊柱灵活性及其对下肢运动的影响的研究。本文的研究结果有助于改善 THA 手术计划并降低 THA 术后髋关节撞击或脱位的风险。


























 京公网安备 11010802027423号
京公网安备 11010802027423号