当前位置:
X-MOL 学术
›
Optim. Control Appl. Methods
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
Disturbance observer-based PID synchronization control of complex networks with probabilistic interval time-varying delays and multiple disturbances
Optimal Control Applications and Methods ( IF 1.8 ) Pub Date : 2023-11-27 , DOI: 10.1002/oca.3084 Yujing Shi 1 , Hongyang Lv 2 , Dongyan Chen 2
Optimal Control Applications and Methods ( IF 1.8 ) Pub Date : 2023-11-27 , DOI: 10.1002/oca.3084 Yujing Shi 1 , Hongyang Lv 2 , Dongyan Chen 2
Affiliation
|
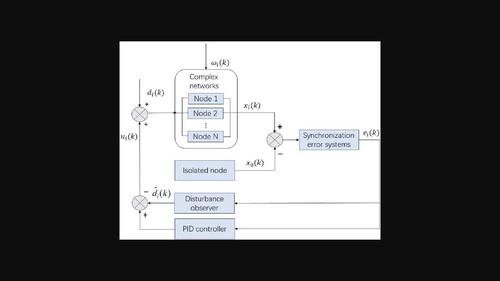
In this article, the disturbance observer-based proportional–integral–derivative (PID) control protocol is investigated for synchronization of complex networks with probabilistic interval time-varying delays and multiple disturbances. For the sake of reducing conservatism, a method of probabilistic interval time-varying delay is proposed by introducing two certain intervals with known probability distributions. Moreover, two different disturbances are taken into account. One of the disturbances is produced by an exogenous system which acts through the input channel, while the other is usual norm-bounded disturbance. Simultaneously, a disturbance observer is designed to estimate and compensate the disturbance generated by the exogenous system. By constructing an appropriate Lyapunov–Krasovskii function, a sufficient criterion is obtained to ensure both the exponential synchronization and prescribed performance index. Finally, the simulation examples are employed to demonstrate the validity of the theoretical results.
中文翻译:

概率区间时变时滞和多重扰动复杂网络的基于扰动观测器的PID同步控制
在本文中,研究了基于扰动观测器的比例积分微分(PID)控制协议,用于具有概率间隔时变延迟和多重扰动的复杂网络的同步。为了降低保守性,通过引入两个已知概率分布的确定区间,提出了一种概率区间时变延迟方法。此外,还考虑了两种不同的干扰。其中一种扰动是由通过输入通道作用的外生系统产生的,而另一种扰动则是通常的范数有界扰动。同时,设计扰动观测器来估计和补偿外源系统产生的扰动。通过构造适当的 Lyapunov-Krasovskii 函数,可以获得充分的准则来确保指数同步和规定的同步性能指标。最后通过仿真算例验证了理论结果的有效性。
更新日期:2023-11-30
中文翻译:
概率区间时变时滞和多重扰动复杂网络的基于扰动观测器的PID同步控制
在本文中,研究了基于扰动观测器的比例积分微分(PID)控制协议,用于具有概率间隔时变延迟和多重扰动的复杂网络的同步。为了降低保守性,通过引入两个已知概率分布的确定区间,提出了一种概率区间时变延迟方法。此外,还考虑了两种不同的干扰。其中一种扰动是由通过输入通道作用的外生系统产生的,而另一种扰动则是通常的范数有界扰动。同时,设计扰动观测器来估计和补偿外源系统产生的扰动。通过构造适当的 Lyapunov-Krasovskii 函数,可以获得充分的准则来确保指数同步和规定的同步性能指标。最后通过仿真算例验证了理论结果的有效性。


























 京公网安备 11010802027423号
京公网安备 11010802027423号