当前位置:
X-MOL 学术
›
IET Radar Sonar Navig.
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
An improved radar clutter suppression by simple neural network
IET Radar Sonar and Navigation ( IF 1.7 ) Pub Date : 2023-11-30 , DOI: 10.1049/rsn2.12510 Jozef Perďoch 1 , Stanislava Gažovová 1 , Miroslav Pacek 1
IET Radar Sonar and Navigation ( IF 1.7 ) Pub Date : 2023-11-30 , DOI: 10.1049/rsn2.12510 Jozef Perďoch 1 , Stanislava Gažovová 1 , Miroslav Pacek 1
Affiliation
|
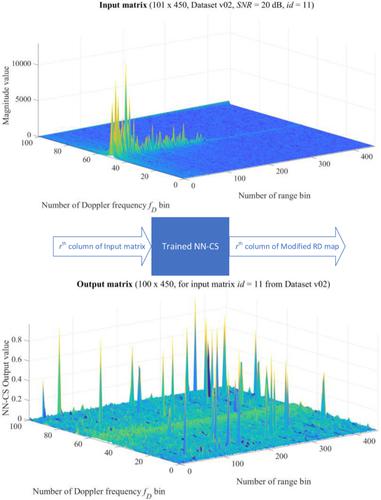
The presented paper is further focused on the presentation and subsequent assessment of utilising a proposed Neural Network (NN) with simple architecture in the role of a signal preprocessing algorithm for the Constant False Alarm Rate detector and the fixed threshold detector applied on a Range-Doppler (RD) map with the aim of radar clutter impact reduction and minimisation of processing time. Based on a comparison of all tested algorithm results, it is possible to state that utilising the proposed NN with simple architecture led to reducing the impact of radar clutter when detecting radar targets on RD maps created from provided datasets. Comparing the mean processing time tmean values of all tested algorithms, the authors can state that employing the proposed NN in combination with the fixed threshold detector led to a significant improvement in the computation time needed for processing one RD map while preserving the suppression of radar clutter and detection of the radar targets.
中文翻译:

简单神经网络改进的雷达杂波抑制
本文进一步重点介绍和随后评估如何利用所提出的具有简单架构的神经网络(NN)作为恒定误报率探测器和应用于距离多普勒的固定阈值探测器的信号预处理算法(RD) 地图,旨在减少雷达杂波影响并最大限度地缩短处理时间。根据所有测试算法结果的比较,可以说,在根据提供的数据集创建的 RD 地图上检测雷达目标时,利用所提出的具有简单架构的神经网络可以减少雷达杂波的影响。比较所有测试算法的平均处理时间t平均值,作者可以指出,将所提出的神经网络与固定阈值检测器结合使用,可以显着改善处理一张 RD 地图所需的计算时间,同时保留雷达的抑制杂波和雷达目标的检测。
更新日期:2023-11-30
中文翻译:
简单神经网络改进的雷达杂波抑制
本文进一步重点介绍和随后评估如何利用所提出的具有简单架构的神经网络(NN)作为恒定误报率探测器和应用于距离多普勒的固定阈值探测器的信号预处理算法(RD) 地图,旨在减少雷达杂波影响并最大限度地缩短处理时间。根据所有测试算法结果的比较,可以说,在根据提供的数据集创建的 RD 地图上检测雷达目标时,利用所提出的具有简单架构的神经网络可以减少雷达杂波的影响。比较所有测试算法的平均处理时间t平均值,作者可以指出,将所提出的神经网络与固定阈值检测器结合使用,可以显着改善处理一张 RD 地图所需的计算时间,同时保留雷达的抑制杂波和雷达目标的检测。


























 京公网安备 11010802027423号
京公网安备 11010802027423号