Transportation Research Part F: Traffic Psychology and Behaviour ( IF 4.349 ) Pub Date : 2023-12-05 , DOI: 10.1016/j.trf.2023.11.018 Shuo Li , Yanghanzi Zhang , Phil Blythe , Simon Edwards , Yanjie Ji
|
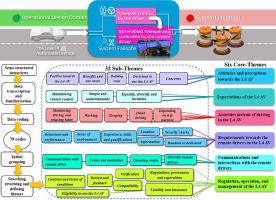
The Level 4 Automated Vehicles (L4 AV) potentially deliver social, economic, safety and environmental benefits. A key feature for the L4 AV is the failsafe mechanism which ensures the safety of the vehicle without human driver input when reaching system limitations. An important solution for the failsafe is the 5G-enabled teleoperation system controlled by a remote driver. However, understanding end-users’ perception, needs and requirements towards the L4 AV is a significant under-researched area. To fill the research gap, this study conducted semi-structured interviews with 29 potential end-users to qualitatively explore the new driver-automation-remote driver interaction in the L4 AV. Results showed that end-users would like to understand how the remote driver operates the vehicle remotely and would not expect them to be multitasking or distracted. They also show that remote drivers’ sensing and information about the driving environment are important. Remote drivers should also be qualified and experienced drivers and must have undergone background security checks before teleoperating the L4 AV. They require remote drivers based in the same country as the L4 AV to prevent issues such as unfamiliar road layouts, different traffic rules, cultural driving style variations, liability concerns, and time differences from affecting performance. They require the remote drivers to clarify what had happened and explain how they will deal with the situation and operate the vehicle in the situation of failsafe in the L4 AV. Dedicated remote drivers are preferred over random ones. A review and feedback system is important for the end-users to evaluate the services and choose preferred remote drivers. Finally, end-users are concerned about the liability and legal implications of utilising a L4 AV, especially during the period that the L4 AV is being operated by the remote drivers.
中文翻译:
远程驾驶作为故障保护:用户对支持 5G 的 4 级自动驾驶汽车的看法和要求的定性调查
4 级自动驾驶汽车 (L4 AV) 可能带来社会、经济、安全和环境效益。L4 AV 的一个关键功能是故障安全机制,可在达到系统限制时确保车辆的安全,无需驾驶员输入。故障安全的一个重要解决方案是由远程驾驶员控制的支持 5G 的远程操作系统。然而,了解最终用户对 L4 AV 的看法、需求和要求是一个重要的研究不足领域。为了填补研究空白,本研究对 29 名潜在最终用户进行了半结构化访谈,以定性探索 L4 AV 中新的驾驶员-自动化-远程驾驶员交互。结果显示,最终用户希望了解远程驾驶员如何远程操作车辆,并且不希望他们同时处理多项任务或分心。他们还表明,远程驾驶员对驾驶环境的感知和信息非常重要。远程驾驶员也应该是合格且经验丰富的驾驶员,并且在远程操作 L4 AV 之前必须经过后台安全检查。它们要求远程驾驶员与 L4 AV 位于同一国家,以防止不熟悉的道路布局、不同的交通规则、文化驾驶风格差异、责任问题和时间差异等影响性能的问题。他们要求远程驾驶员澄清发生了什么,并解释他们将如何处理这种情况并在 L4 AV 的故障安全情况下操作车辆。专用远程驱动程序优于随机驱动程序。审查和反馈系统对于最终用户评估服务并选择首选的远程驱动程序非常重要。最后,最终用户担心使用 L4 AV 的责任和法律影响,尤其是在远程驾驶员操作 L4 AV 期间。


























 京公网安备 11010802027423号
京公网安备 11010802027423号