当前位置:
X-MOL 学术
›
Regul. Chaot. Dyn.
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
Stabilization of Steady Rotations of a Spherical Robot on a Vibrating Base Using Feedback
Regular and Chaotic Dynamics ( IF 1.4 ) Pub Date : 2023-12-07 , DOI: 10.1134/s1560354723060060 Alexander A. Kilin , Tatiana B. Ivanova , Elena N. Pivovarova
中文翻译:

利用反馈稳定振动基座上球形机器人的稳定旋转
更新日期:2023-12-10
Regular and Chaotic Dynamics ( IF 1.4 ) Pub Date : 2023-12-07 , DOI: 10.1134/s1560354723060060 Alexander A. Kilin , Tatiana B. Ivanova , Elena N. Pivovarova
|
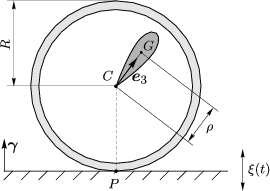
This paper treats the problem of a spherical robot with an axisymmetric pendulum drive rolling without slipping on a vibrating plane. The main purpose of the paper is to investigate the stabilization of the upper vertical rotations of the pendulum using feedback (additional control action). For the chosen type of feedback, regions of asymptotic stability of the upper vertical rotations of the pendulum are constructed and possible bifurcations are analyzed. Special attention is also given to the question of the stability of periodic solutions arising as the vertical rotations lose stability.
中文翻译:
利用反馈稳定振动基座上球形机器人的稳定旋转
本文研究了轴对称摆驱动球形机器人在振动平面上滚动而不滑移的问题。本文的主要目的是利用反馈(附加控制动作)研究摆锤上部垂直旋转的稳定性。对于所选的反馈类型,构建了摆锤上部垂直旋转的渐近稳定区域,并分析了可能的分叉。还特别关注当垂直旋转失去稳定性时出现的周期解的稳定性问题。


























 京公网安备 11010802027423号
京公网安备 11010802027423号