当前位置:
X-MOL 学术
›
IET Radar Sonar Navig.
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
Robust factor graph optimisation method for shipborne GNSS/INS integrated navigation system
IET Radar Sonar and Navigation ( IF 1.7 ) Pub Date : 2023-12-09 , DOI: 10.1049/rsn2.12521 Yuan Hu 1 , Haozheng Li 1 , Wei Liu 2
IET Radar Sonar and Navigation ( IF 1.7 ) Pub Date : 2023-12-09 , DOI: 10.1049/rsn2.12521 Yuan Hu 1 , Haozheng Li 1 , Wei Liu 2
Affiliation
|
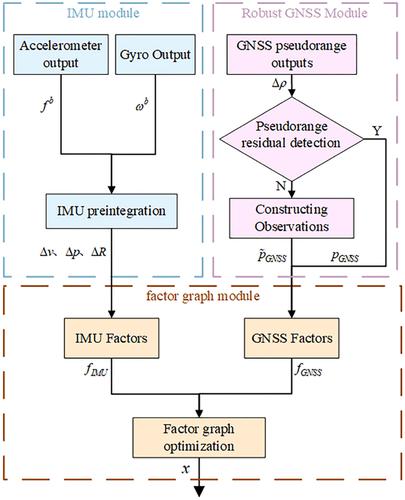
Robust Global Navigation Satellite System (GNSS) factors are introduced into a factor graph optimisation based integrated navigation system to address the challenge of occluded GNSS signals during ship navigation, which leads to increased errors in positioning results. To enhance the robustness of the GNSS tracking loop, a vector tracking method is applied to receiver tracking loop. Then, the Mahalanobis distance was employed to assess the pseudorange residual and identify and reject signals that exhibit anomalies. Specifically, the pseudorange residual is computed as the difference between the predicted pseudorange of the GNSS receiver and the measured pseudorange. Using the historical information in the window, robust GNSS factors were constructed for use in the factor graph. The robust factor graph optimisation method for a shipborne GNSS/Inertial Navigation System integrated navigation system was implemented by constructing robust GNSS factors and Inertial Measurement Unit factors. The experimental results confirm that the positioning accuracy of the proposed method is superior to those of the factor graph optimization and extended Kalman filter.
中文翻译:

船载GNSS/INS组合导航系统鲁棒因子图优化方法
基于因子图优化的组合导航系统引入鲁棒全球导航卫星系统(GNSS)因子,以解决船舶导航过程中GNSS信号被遮挡导致定位结果误差增加的问题。为了增强 GNSS 跟踪环路的鲁棒性,将矢量跟踪方法应用于接收机跟踪环路。然后,采用马哈拉诺比斯距离来评估伪距残差并识别和拒绝表现出异常的信号。具体来说,伪距残差被计算为GNSS接收器的预测伪距与测量伪距之间的差。使用窗口中的历史信息,构建了稳健的 GNSS 因子以在因子图中使用。通过构造鲁棒GNSS因子和惯性测量单元因子,实现了船载GNSS/惯性导航系统组合导航系统鲁棒因子图优化方法。实验结果证实,该方法的定位精度优于因子图优化和扩展卡尔曼滤波器。
更新日期:2023-12-11
中文翻译:
船载GNSS/INS组合导航系统鲁棒因子图优化方法
基于因子图优化的组合导航系统引入鲁棒全球导航卫星系统(GNSS)因子,以解决船舶导航过程中GNSS信号被遮挡导致定位结果误差增加的问题。为了增强 GNSS 跟踪环路的鲁棒性,将矢量跟踪方法应用于接收机跟踪环路。然后,采用马哈拉诺比斯距离来评估伪距残差并识别和拒绝表现出异常的信号。具体来说,伪距残差被计算为GNSS接收器的预测伪距与测量伪距之间的差。使用窗口中的历史信息,构建了稳健的 GNSS 因子以在因子图中使用。通过构造鲁棒GNSS因子和惯性测量单元因子,实现了船载GNSS/惯性导航系统组合导航系统鲁棒因子图优化方法。实验结果证实,该方法的定位精度优于因子图优化和扩展卡尔曼滤波器。


























 京公网安备 11010802027423号
京公网安备 11010802027423号