Computational Statistics ( IF 1.3 ) Pub Date : 2023-12-14 , DOI: 10.1007/s00180-023-01443-4 Peiyi Zhang , Tianning Dong , Faming Liang
|
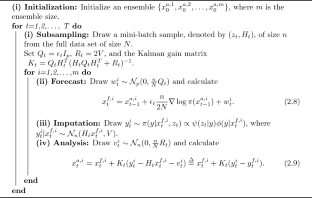
State estimation for large-scale non-Gaussian dynamic systems remains an unresolved issue, given nonscalability of the existing particle filter algorithms. To address this issue, this paper extends the Langevinized ensemble Kalman filter (LEnKF) algorithm to non-Gaussian dynamic systems by introducing a latent Gaussian measurement variable to the dynamic system. The extended LEnKF algorithm can converge to the right filtering distribution as the number of stages become large, while inheriting the scalability of the LEnKF algorithm with respect to the sample size and state dimension. The performance of the extended LEnKF algorithm is illustrated by dynamic network embedding and dynamic Poisson spatial models.
中文翻译:
用于非高斯动态系统的扩展 Langevinized 系综卡尔曼滤波器
鉴于现有粒子滤波器算法的不可扩展性,大规模非高斯动态系统的状态估计仍然是一个未解决的问题。为了解决这个问题,本文通过向动态系统引入潜在高斯测量变量,将朗之万集成卡尔曼滤波器(LEnKF)算法扩展到非高斯动态系统。扩展的LEnKF算法可以随着级数变大而收敛到正确的滤波分布,同时继承了LEnKF算法在样本大小和状态维数方面的可扩展性。通过动态网络嵌入和动态泊松空间模型说明了扩展 LEnKF 算法的性能。


























 京公网安备 11010802027423号
京公网安备 11010802027423号