Journal of Machinery Manufacture and Reliability Pub Date : 2023-12-18 , DOI: 10.1134/s1052618823060080 V. A. Glazunov , P. A. Laryushkin , K. A. Shalyukhin
|
Abstract
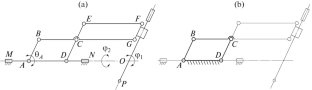
A mechanism with a remote center of rotation, intended for use in medicine, and in particular, minimally invasive operations, is discussed. The basic mechanism consists of two parallelograms with common links, which allows the surgical instrument to duplicate the movement of the drive link of the mechanism. To ensure greater rigidity of the mechanism, it is proposed to introduce drive redundancy through the use of an additional RRR dyad with a drive pair. The position problem has been solved for the resulting mechanism. A 3D model and a prototype of the mechanism have been also presented.
中文翻译:
具有远程旋转中心的并联机械手的结构、运动学和原型设计
摘要
讨论了一种具有远程旋转中心的机构,旨在用于医学,特别是微创手术。基本机构由两个带有公共连杆的平行四边形组成,这使得手术器械能够复制该机构驱动连杆的运动。为了确保机构具有更大的刚度,建议通过使用带有驱动对的附加 RRR 二元组来引入驱动冗余。由此产生的机制已经解决了位置问题。还展示了该机构的 3D 模型和原型。


























 京公网安备 11010802027423号
京公网安备 11010802027423号