当前位置:
X-MOL 学术
›
J. Mach. Manuf. Reliab.
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
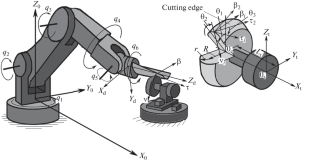
Position and Force Control of a Robotic System for High Precision Machining of Complex Surfaces
Journal of Machinery Manufacture and Reliability Pub Date : 2023-12-28 , DOI: 10.1134/s1052618823080022 V. L. Afonin , V. V. Sleptsov , M. G. Yakovlev
中文翻译:

用于复杂表面高精度加工的机器人系统的位置和力控制
更新日期:2023-12-29
Journal of Machinery Manufacture and Reliability Pub Date : 2023-12-28 , DOI: 10.1134/s1052618823080022 V. L. Afonin , V. V. Sleptsov , M. G. Yakovlev
|
Abstract
The position and force control of a robotic system to perform high-precision operations for machining complex surfaces are considered. A block diagram of the position and force control system is presented, and computations and calculations of the velocity of the longitudinal displacement and its relationship with the transverse displacement and pressure force between the cutting edge of the tool and the machining surface are provided. The structure of the system generating force action and the modeling of this system in the Matlab–Simulink system are described.
中文翻译:
用于复杂表面高精度加工的机器人系统的位置和力控制
摘要
考虑机器人系统的位置和力控制,以执行加工复杂表面的高精度操作。给出了位置和力控制系统的框图,并给出了纵向位移速度及其与横向位移和刀具切削刃与加工表面之间压力的关系的计算和计算。描述了产生力作用的系统结构以及该系统在Matlab-Simulink系统中的建模。


























 京公网安备 11010802027423号
京公网安备 11010802027423号