GPS Solutions ( IF 4.9 ) Pub Date : 2023-12-29 , DOI: 10.1007/s10291-023-01592-5 Wenfei Guo , Mengmeng Zhu , Shengfeng Gu , Hongming Zuo , Jingnan Liu
|
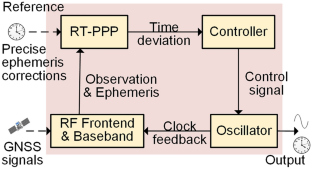
Clock steering is crucial for Global Navigation Satellite System (GNSS) timing receivers to provide high-performance time and frequency. However, the lack of theoretical analysis and design methods makes it difficult to apply an existing controller to the emerging real-time precise point positioning (RT-PPP) timing receiver. In this research, a Linear Quadratic Gaussian (LQG)-based clock steering method for the RT-PPP timing receiver is proposed with a detailed design process. We theoretically derive the transfer function of the system first. Then, the relationship between the system bandwidth and the control parameter is present. As for the parametric design, based on the analysis of the free-running oscillator instability, the RT satellite clock reference variation, and the GNSS observation noise, the parameters of the Kalman estimator are set, and the optimal bandwidth of the system is estimated. Under the constraint of the bandwidth and the damping ratio, the control parameters of the LQG controller are determined finally. Simulated results show that the parametric design method is feasible for different noise conditions. And finally, we evaluate the performance of the proposed clock steering method on a Rubidium clock RT-PPP timing receiver. Experimental results show that the timing receiver realizes the optimal combination of the short-term stability of the Rubidium clock and the long-term stability of the RT-PPP reference expectedly. The precision of the output one pulse per second (1PPS) is 0.21 ns over 24 h. And the frequency stabilities can reach 3.59E-12@1s and 2.43E-14@10000s, which is more stable than a high-quality Cesium clock.
中文翻译:
基于线性二次高斯的GNSS实时精密单点定位授时接收机时钟控制系统
时钟控制对于全球导航卫星系统 (GNSS) 授时接收器提供高性能时间和频率至关重要。然而,由于缺乏理论分析和设计方法,现有控制器很难应用于新兴的实时精确单点定位(RT-PPP)授时接收机。在本研究中,提出了一种用于 RT-PPP 定时接收器的基于线性二次高斯 (LQG) 的时钟控制方法,并给出了详细的设计过程。我们首先从理论上推导系统的传递函数。然后,给出了系统带宽和控制参数之间的关系。参数设计方面,在分析自振振荡器不稳定性、RT卫星时钟基准变化和GNSS观测噪声的基础上,设置卡尔曼估计器的参数,估计系统的最佳带宽。在带宽和阻尼比的约束下,最终确定了LQG控制器的控制参数。仿真结果表明,该参数化设计方法对于不同的噪声条件是可行的。最后,我们评估了所提出的时钟控制方法在铷时钟 RT-PPP 定时接收器上的性能。实验结果表明,该授时接收机实现了铷钟短期稳定性与RT-PPP参考长期稳定性的最佳结合。24 小时内每秒一脉冲 (1PPS) 的输出精度为 0.21 ns。并且频率稳定度可以达到3.59E-12@1s和2.43E-14@10000s,比高品质铯钟更加稳定。


























 京公网安备 11010802027423号
京公网安备 11010802027423号