Journal of Optimization Theory and Applications ( IF 1.9 ) Pub Date : 2024-01-09 , DOI: 10.1007/s10957-023-02364-4 Jerome Weston , Domagoj Tolić , Ivana Palunko
|
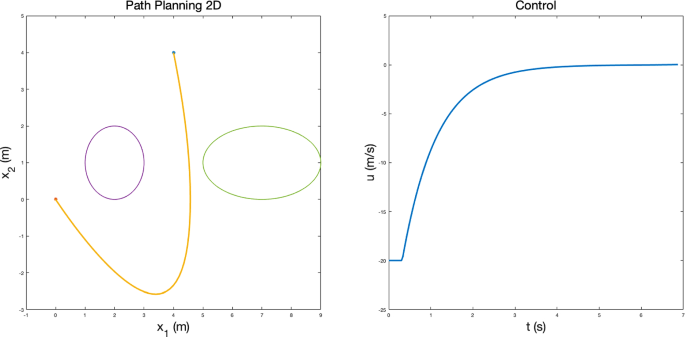
This article applies novel results for infinite- and finite-horizon optimal control problems with nonlinear dynamics and constraints. We use the Valentine transformation to convert a constrained optimal control problem into an unconstrained one and show uniqueness of the value function to the corresponding Hamilton–Jacobi–Bellman (HJB) equation. From there, we show how to approximate the solution of the initial (in)finite-horizon problem with a family of solutions that is \(\varGamma \)-convergent. Optimal solutions are efficiently obtained via a solver based on Pontryagin’s Principle (PP). The proposed methodology is demonstrated on the path planning problem using the full nonlinear dynamics of an unmanned aerial vehicle (UAV) and autonomous underwater vehicle (AUV) involving state constraints in 3D environments with obstacles.
中文翻译:
汉密尔顿-雅可比-贝尔曼方程/庞特里亚金原理在约束最优控制中的应用
本文将新颖的结果应用于具有非线性动力学和约束的无限和有限范围最优控制问题。我们使用 Valentine 变换将受约束的最优控制问题转换为无约束的最优控制问题,并显示价值函数与相应的 Hamilton-Jacobi-Bellman (HJB) 方程的唯一性。从那里,我们展示了如何用一系列\(\varGamma \)收敛的解来近似初始(内)有限范围问题的解。通过基于庞特里亚金原理 (PP) 的求解器可以有效地获得最优解。使用无人机 (UAV) 和自主水下航行器 (AUV) 的完全非线性动力学在路径规划问题上演示了所提出的方法,涉及有障碍物的 3D 环境中的状态约束。


























 京公网安备 11010802027423号
京公网安备 11010802027423号