International Journal of Intelligent Robotics and Applications Pub Date : 2024-01-12 , DOI: 10.1007/s41315-023-00307-w Hadi Kolivand , Azita Souri , Arash Ahmadi
|
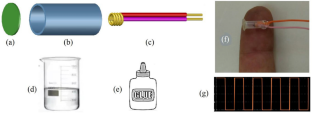
A new soft pneumatic microactuator based on alternative pole water electrolysis has recently been proposed. In these actuators, a water-based electrolyte is electrolyzed under an alternative current, generating hydrogen/oxygen nanobubbles/microbubbles. These bubbles cause the expansion of the electrolyte, resulting in the displacement of the actuator membrane. These actuators stand out for their lightweight design, cost-effectiveness, high performance, and versatility for various applications. In this paper, a strong and fast millimeter-sized actuator based on alternative pole water electrolysis is proposed. The proposed actuator, electronic driver circuits, and measurement systems is implemented, and some experiments to investigate the actuator’s performance under different conditions, including input variables such as voltage, time, temperature, and mass load are conducted. Our experimental results and comparisons with other actuators demonstrate that the proposed actuator exhibits favorable properties in terms of response time, output mechanical force, reliability, scalability, and simplicity of manufacturing. The versatility of this actuator makes it suitable for a wide range of soft robotics applications, including limb movement and manipulation. Additionally, it has potential medical applications such as microrobotics for navigation in narrow body channels for diagnosis, sampling, drug delivery, and surgery.
Graphical abstract
中文翻译:
基于替代极水电解的强而快速的毫米级软气动执行器
最近提出了一种基于替代极水电解的新型软气动微执行器。在这些执行器中,水基电解质在交流电下电解,产生氢/氧纳米气泡/微气泡。这些气泡导致电解质膨胀,导致执行器膜发生位移。这些执行器因其轻量化设计、成本效益、高性能和适用于各种应用的多功能性而脱颖而出。本文提出了一种基于交替极水电解的强而快速的毫米级执行器。所提出的执行器、电子驱动电路和测量系统已被实现,并进行了一些实验来研究执行器在不同条件下的性能,包括电压、时间、温度和质量负载等输入变量。我们的实验结果以及与其他执行器的比较表明,所提出的执行器在响应时间、输出机械力、可靠性、可扩展性和制造简单性方面表现出良好的特性。该执行器的多功能性使其适用于各种软机器人应用,包括肢体运动和操纵。此外,它还具有潜在的医学应用,例如用于在狭窄的身体通道中导航以进行诊断、采样、药物输送和手术的微型机器人。


























 京公网安备 11010802027423号
京公网安备 11010802027423号