Journal of Computer and Systems Sciences International ( IF 0.6 ) Pub Date : 2024-01-12 , DOI: 10.1134/s1064230723060096 Yu. D. Selyutskiy , A. M. Formalskii
|
Abstract
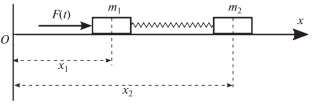
We study a mechanical system with two degrees of freedom, consisting of two absolutely rigid bodies (material points) connected to each other by a weightless rectilinear viscoelastic rod that can be stretched or compressed. The bodies can move translationally along a fixed straight line. A control force limited in absolute value is applied to one of them, whose vector is directed along the rod. A continuous piecewise-linear control in time, which transfers the system from one equilibrium position to another in a length of time close to the minimum possible time, is constructed. In the absence of viscosity, with the constructed quasi time-optimal control, unwanted vibrations of the bodies are not excited either during the transition process or when it ends. In contrast to the time-optimal relay control, the constructed continuous control is also robust with respect to the uncertainty of the design parameters.
中文翻译:
二自由度系统时间最优控制问题中的振动防治
摘要
我们研究一个具有两个自由度的机械系统,该系统由两个绝对刚体(材料点)组成,通过可拉伸或压缩的失重直线粘弹性杆相互连接。物体可以沿着固定的直线平移。将绝对值有限的控制力施加到其中一个,其矢量沿着杆。构建了一种时间上的连续分段线性控制,该控制在接近最小可能时间的时间内将系统从一个平衡位置转移到另一个平衡位置。在没有粘度的情况下,通过构建的准时间最优控制,在过渡过程中或结束时不会激发物体的不需要的振动。与时间最优继电器控制相比,所构造的连续控制对于设计参数的不确定性也具有鲁棒性。


























 京公网安备 11010802027423号
京公网安备 11010802027423号