Multibody System Dynamics ( IF 3.4 ) Pub Date : 2024-01-16 , DOI: 10.1007/s11044-023-09961-1 Osama Obeid , Eric Lanteigne
|
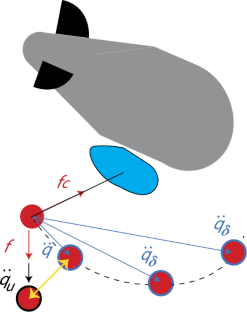
This paper discusses modelling of a multibody system consisting of airship, gondola, and a slung payload. Lighter-than-air vehicles undergo inertial forces that are often neglected in heavier-than-air vehicles. These inertial forces are modelled using added mass and added inertia. The dynamics of the multibody system were first modelled using the Udwadia–Kalaba method. Three constraints were derived and enforced. The resulting equation of motion was used to identify the added mass, added inertia, and inertia of the airship through system identification procedure. The proposed system identification method utilizes semidefinite programming with equality and inequality constraints to find any unknown parameters in the mass matrix of the multibody system. Three experiments were carried out to perform the system identification and validate the dynamic model. The identified mass matrix was used to reconstruct the trajectories of the experiments. Using the experimentally obtained mass matrix demonstrated \(35\%\) lower error when compared with simulated trajectories using approximated mass matrices.
中文翻译:
悬挂有效载荷无人飞艇建模与系统辨识
本文讨论了由飞艇、吊舱和悬挂有效载荷组成的多体系统的建模。比空气轻的飞行器会承受惯性力,而在比空气重的飞行器中,惯性力常常被忽略。这些惯性力是使用附加质量和附加惯性来建模的。首先使用 Udwadia-Kalaba 方法对多体系统的动力学进行建模。导出并实施了三个约束。由此产生的运动方程用于通过系统辨识程序来辨识飞艇的附加质量、附加惯性和惯量。所提出的系统识别方法利用具有等式和不等式约束的半定规划来查找多体系统的质量矩阵中的任何未知参数。进行了三个实验来执行系统辨识并验证动态模型。确定的质量矩阵用于重建实验的轨迹。与使用近似质量矩阵的模拟轨迹相比,使用实验获得的质量矩阵的误差降低了\(35\%\) 。


























 京公网安备 11010802027423号
京公网安备 11010802027423号