GPS Solutions ( IF 4.9 ) Pub Date : 2024-01-27 , DOI: 10.1007/s10291-023-01610-6 Jiang Guo , Jianghui Geng , Jing Zeng , Xiangyu Song , Pascale Defraigne
|
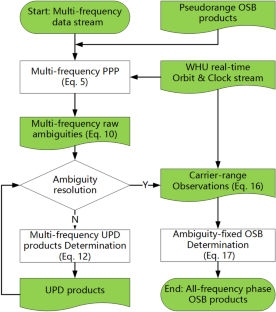
While few phase bias streams are available from the IGS Real-time Service Phase, such products are essential to enable PPP ambiguity resolution. Satellite phase biases and clocks should be estimated when fixing undifferenced ambiguities in a network solution, which is troublesome in real time and thus usually not done in practice. This study estimates real-time GPS/Galileo/BDS ambiguity-fixed multi-frequency raw phase biases from GNSS observation modeling. Multi-frequency narrow-lane and wide-lane uncalibrated phase delays (UPDs) are first extracted from the float ambiguities of the stations. Multi-frequency raw ambiguities are then resolved to form unambiguous carrier-range observations. Finally, the satellite phase observable-specific signal biases (phase OSBs) are estimated directly from the real-time network data processing using carrier-range observations only. The approach has been applied to generate real-time phase bias products at the Wuhan IGS analysis center. Real-time products are routinely calculated by 180 globally distributed stations. This study validates the approach and associated products using one week of data. The results show that triple-frequency kinematic PPP-AR based on the ambiguity-fixed phase OSBs can converge in 7.2 min on average, while those based on UPD products take 11.2 min to converge. The other software, PRIDE PPP-AR is used to validate the high-precision static positioning performance of the real-time OSB products. The results show that 82%, 85% and 76% of GPS, Galileo and BDS-3 narrow-lane ambiguities can be resolved successfully among global stations, achieving a mean positioning accuracy of 3.1, 3.0 and 6.0 mm for the east, north and up components.
中文翻译:
来自武汉 IGS 分析中心的 GPS/Galileo/BDS 相位偏差流,用于实时 PPP 模糊度解析
虽然 IGS 实时服务阶段提供的相位偏差流很少,但此类产品对于实现 PPP 模糊度解决至关重要。在修复网络解决方案中的无差别模糊度时,应该估计卫星相位偏差和时钟,这在实时性上很麻烦,因此在实践中通常不会这样做。本研究根据 GNSS 观测模型估计实时 GPS/Galileo/BDS 模糊度固定的多频率原始相位偏差。首先从站点的浮动模糊度中提取多频窄巷和宽巷未校准相位延迟(UPD)。然后解决多频率原始模糊度,形成明确的载波范围观测结果。最后,仅使用载波范围观测结果直接从实时网络数据处理中估计卫星相位可观测特定信号偏差(相位 OSB)。该方法已应用于武汉 IGS 分析中心生成实时相位偏差产品。实时产品通常由全球分布的 180 个站点进行计算。这项研究使用一周的数据验证了该方法和相关产品。结果表明,基于模糊度固定相位OSB的三频运动PPP-AR平均可以在7.2 min内收敛,而基于UPD产品的三频运动PPP-AR平均需要11.2 min收敛。另一个软件PRIDE PPP-AR用于验证实时OSB产品的高精度静态定位性能。结果表明,全球站间GPS、伽利略、北斗三号窄带模糊度解算率分别为82%、85%和76%,东、北、北三面平均定位精度分别达到3.1、3.0和6.0毫米。组件。


























 京公网安备 11010802027423号
京公网安备 11010802027423号