GPS Solutions ( IF 4.9 ) Pub Date : 2024-01-27 , DOI: 10.1007/s10291-023-01608-0 Rui Gao , Zhizhao Liu , Robert Odolinski , Baocheng Zhang
|
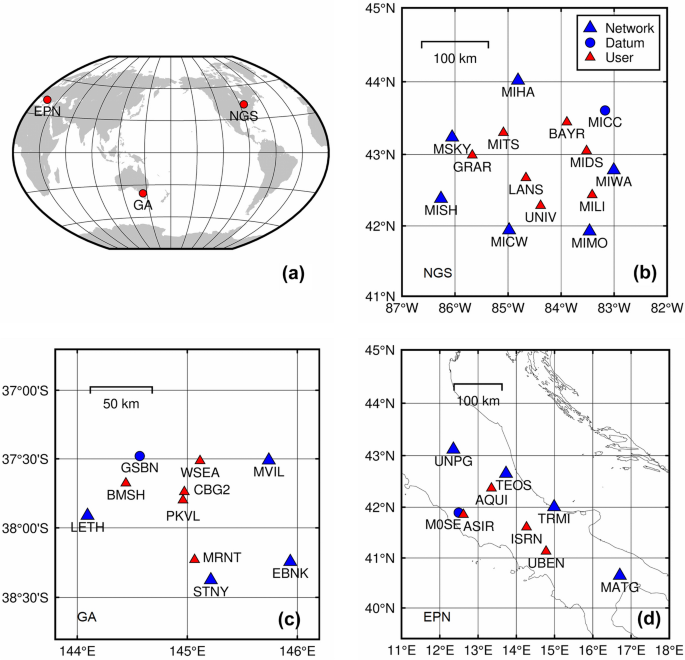
The precise point positioning real-time kinematic (PPP-RTK) is a high-precision global navigation satellite system (GNSS) positioning technique that combines the advantages of wide-area coverage in precise point positioning (PPP) and of rapid convergence in real-time kinematic (RTK). However, the PPP-RTK convergence is still limited by the precision of slant ionospheric delays and tropospheric zenith wet delay (ZWD), which affects the PPP-RTK network parameters estimation and user positioning performance. The present study aims to construct a PPP-RTK model augmented with a priori ZWD values derived from the global forecast system (GFS) product (a global numerical weather prediction (NWP) model) to improve the PPP-RTK performance. This study gives a priori ZWD values and conversion based on the GFS products, and the full-rank GFS-augmented undifferenced and uncombined (UDUC) PPP-RTK network model is derived. To verify the performance of GFS-augmented UDUC PPP-RTK, a comprehensive evaluation using 10-day GNSS observation data from three different GNSS station networks in the United States (US), Australia, and Europe is conducted. The results show that with the GFS ZWD a priori information, PPP-RTK performance significantly improves at the initial filtering stage, but this advantage gradually decays over time. Based on 10-day positioning results for all user stations, the GFS ZWD-augmented PPP-RTK approach reduces the average convergence time by 46% from 10.0 to 5.4 min, the three-dimensional root-mean-square (3D-RMS) error by 5.7% from 3.5 to 3.3 cm, and the time to first fix (TTFF) value by 35.8% from 6.7 to 4.3 min, all when compared to the traditional PPP-RTK without GFS ZWD constraints.
中文翻译:
通过全球预报系统天顶湿延迟增强改进 GNSS PPP-RTK
精密单点定位实时运动(PPP-RTK)是一种高精度全球导航卫星系统(GNSS)定位技术,结合了精密单点定位(PPP)广域覆盖和实时快速收敛的优点。时间运动学 (RTK)。然而,PPP-RTK收敛仍受到倾斜电离层延迟和对流层天顶湿延迟(ZWD)精度的限制,影响PPP-RTK网络参数估计和用户定位性能。本研究旨在构建一个 PPP-RTK 模型,并增强来自全球预报系统(GFS)产品(全球数值天气预报(NWP)模型)的先验 ZWD 值,以提高 PPP-RTK 性能。本研究给出了基于GFS产品的先验ZWD值和转换,并推导了全秩GFS增强非差分非组合(UDUC)PPP-RTK网络模型。为了验证 GFS 增强 UDUC PPP-RTK 的性能,使用来自美国、澳大利亚和欧洲三个不同 GNSS 站网络的 10 天 GNSS 观测数据进行了综合评估。结果表明,利用GFS ZWD先验信息,PPP-RTK性能在初始滤波阶段显着提高,但这种优势随着时间的推移逐渐衰减。基于所有用户站10天的定位结果,GFS ZWD增强的PPP-RTK方法将平均收敛时间从10.0分钟减少到5.4分钟,三维均方根(3D-RMS)误差减少了46%与没有 GFS ZWD 约束的传统 PPP-RTK 相比,从 3.5 厘米到 3.3 厘米,首次定位时间 (TTFF) 值缩短了 35.8%,从 6.7 到 4.3 分钟。


























 京公网安备 11010802027423号
京公网安备 11010802027423号