Computational and Structural Biotechnology Journal ( IF 6 ) Pub Date : 2024-01-26 , DOI: 10.1016/j.csbj.2024.01.017 Harris Nisar , Srikar Annamraju , Shankar A. Deka , Anne Horowitz , Dušan M. Stipanović
|
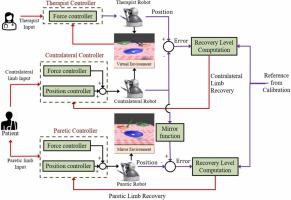
Mirror therapy is a standard technique of rehabilitation for recovering motor and vision abilities of stroke patients, especially in the case of asymmetric limb function. To enhance traditional mirror therapy, robotic mirror therapy (RMT) has been proposed over the past decade, allowing for assisted bimanual coordination of paretic (affected) and contralateral (healthy) limbs. However, state-of-the-art RMT platforms predominantly target mirrored motions of trajectories, largely limited to 2-D motions. In this paper, an RMT platform is proposed, which can facilitate the patient to practice virtual activities of daily living (ADL) and thus enhance their independence. Two similar (but mirrored) 3D virtual environments are created in which the patients operate robots with both their limbs to complete ADL (such as writing and eating) with the assistance of the therapist. The recovery level of the patient is continuously assessed by monitoring their ability to track assigned trajectories. The patient’s robots are programmed to assist the patient in following these trajectories based on this recovery level. In this paper, the framework to dynamically monitor recovery level and accordingly provide assistance is developed along with the nonlinear controller design to ensure position tracking, force control, and stability. Proof-of-concept studies are conducted with both 3D trajectory tracking and ADL. The results demonstrate the potential use of the proposed system to enhance the recovery of the patients.
中文翻译:
通过虚拟日常生活活动进行中风康复的机器人镜疗法
镜像疗法是恢复中风患者运动和视力能力的标准康复技术,特别是在肢体功能不对称的情况下。为了增强传统的镜像疗法,在过去的十年中提出了机器人镜像疗法(RMT),允许辅助瘫痪(受影响)和对侧(健康)肢体的双手协调。然而,最先进的 RMT 平台主要针对轨迹的镜像运动,很大程度上限于二维运动。本文提出了一个RMT平台,可以方便患者练习虚拟日常生活活动(ADL),从而增强他们的独立性。创建两个相似(但镜像)的 3D 虚拟环境,患者在治疗师的帮助下用双肢操作机器人来完成 ADL(例如写作和进食)。通过监测患者跟踪指定轨迹的能力来持续评估患者的恢复水平。患者的机器人被编程为根据该恢复水平帮助患者遵循这些轨迹。在本文中,动态监控恢复水平并相应提供帮助的框架与非线性控制器设计一起开发,以确保位置跟踪、力控制和稳定性。通过 3D 轨迹跟踪和 ADL 进行概念验证研究。结果证明了所提出的系统在促进患者康复方面的潜在用途。


























 京公网安备 11010802027423号
京公网安备 11010802027423号