当前位置:
X-MOL 学术
›
Photogramm. Rec.
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
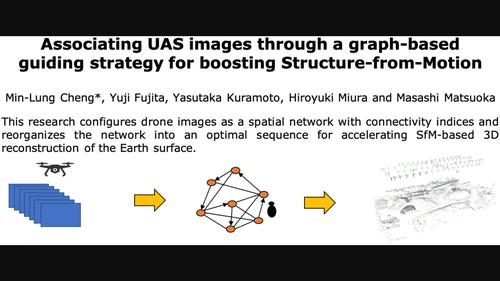
Associating UAS images through a graph-based guiding strategy for boosting structure from motion
The Photogrammetric Record ( IF 2.4 ) Pub Date : 2024-02-01 , DOI: 10.1111/phor.12479 Min‐Lung Cheng 1 , Yuji Fujita 1 , Yasutaka Kuramoto 1 , Hiroyuki Miura 2 , Masashi Matsuoka 3
The Photogrammetric Record ( IF 2.4 ) Pub Date : 2024-02-01 , DOI: 10.1111/phor.12479 Min‐Lung Cheng 1 , Yuji Fujita 1 , Yasutaka Kuramoto 1 , Hiroyuki Miura 2 , Masashi Matsuoka 3
Affiliation
|
Structure from motion (SfM) using optical images has been an important prerequisite for reconstructing three-dimensional (3D) landforms. Although various algorithms have been developed in the past, they suffer from many image pairs for feature matching and recursive searching for the most suitable image to add to SfM reconstruction. Thus, carrying out SfM is computationally costly. This research proposes a boosting SfM (B-SfM) pipeline containing two phases, indexing graph network (IGN) and graph tracking, to accelerate SfM reconstruction. The IGN intends to form image pairs presenting desirable spatial correlation to reduce the time costs spent for feature matching. Building on the IGN, graph tracking integrates ant colony optimisation and greedy sorting algorithms to encode an optimum image sequence to boost SfM reconstruction. Compared to the results derived from other available means, the experimental results show that the proposed approach can accelerate the two phases, feature matching and 3D reconstruction, by up to 14 times faster. The quality of the camera poses recovered is retained or even slightly improved. As a result, the developed B-SfM can efficiently achieve SfM reconstruction by suppressing the time cost in the fashion of image pair selection for feature matching and image order determination for more efficient SfM reconstruction.
中文翻译:

通过基于图形的引导策略关联 UAS 图像,以增强运动结构
使用光学图像的运动结构(SfM)一直是重建三维(3D)地貌的重要先决条件。尽管过去已经开发了各种算法,但它们都受到许多图像对的困扰,这些图像对用于特征匹配和递归搜索最合适的图像以添加到 SfM 重建中。因此,执行 SfM 的计算成本很高。本研究提出了一种Boosting SfM(B-SfM)管道,包含索引图网络(IGN)和图跟踪两个阶段,以加速SfM重建。 IGN 旨在形成具有理想空间相关性的图像对,以减少特征匹配所花费的时间成本。图跟踪以 IGN 为基础,集成了蚁群优化和贪婪排序算法来编码最佳图像序列,以促进 SfM 重建。与其他可用方法得出的结果相比,实验结果表明,所提出的方法可以将特征匹配和 3D 重建这两个阶段的速度提高多达 14 倍。恢复的相机姿势的质量得到保留,甚至略有提高。因此,所开发的 B-SfM 可以通过抑制特征匹配的图像对选择和图像顺序确定的时间成本来有效地实现 SfM 重建,从而实现更高效的 SfM 重建。
更新日期:2024-02-01
中文翻译:
通过基于图形的引导策略关联 UAS 图像,以增强运动结构
使用光学图像的运动结构(SfM)一直是重建三维(3D)地貌的重要先决条件。尽管过去已经开发了各种算法,但它们都受到许多图像对的困扰,这些图像对用于特征匹配和递归搜索最合适的图像以添加到 SfM 重建中。因此,执行 SfM 的计算成本很高。本研究提出了一种Boosting SfM(B-SfM)管道,包含索引图网络(IGN)和图跟踪两个阶段,以加速SfM重建。 IGN 旨在形成具有理想空间相关性的图像对,以减少特征匹配所花费的时间成本。图跟踪以 IGN 为基础,集成了蚁群优化和贪婪排序算法来编码最佳图像序列,以促进 SfM 重建。与其他可用方法得出的结果相比,实验结果表明,所提出的方法可以将特征匹配和 3D 重建这两个阶段的速度提高多达 14 倍。恢复的相机姿势的质量得到保留,甚至略有提高。因此,所开发的 B-SfM 可以通过抑制特征匹配的图像对选择和图像顺序确定的时间成本来有效地实现 SfM 重建,从而实现更高效的 SfM 重建。


























 京公网安备 11010802027423号
京公网安备 11010802027423号