当前位置:
X-MOL 学术
›
Int. J. Nav. Archit. Ocean Eng.
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
Method for anti-collision path planning using velocity obstacle and A* algorithms for maritime autonomous surface ship
International Journal of Naval Architecture and Ocean Engineering ( IF 2.2 ) Pub Date : 2024-02-04 , DOI: 10.1016/j.ijnaoe.2024.100586 Donghun Yu , Myung-Il Roh
International Journal of Naval Architecture and Ocean Engineering ( IF 2.2 ) Pub Date : 2024-02-04 , DOI: 10.1016/j.ijnaoe.2024.100586 Donghun Yu , Myung-Il Roh
|
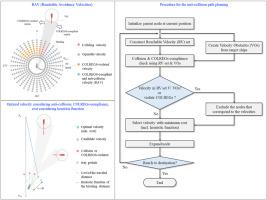
With the increasing size of ships and increasing demand for autonomous navigation, ensuring ship safety is not the only concern; the efficiency of anti-collision technology should be enhanced. In this paper, we propose a novel hybrid anti-collision path planning method called VO-PATH. This method combines the advantages of the Velocity Obstacle (VO) algorithm, which guarantees anti-collision for autonomous ships, with the A* algorithm, which is known for its capacity to optimize paths. To assess the effectiveness of the proposed method, we conducted anti-collision simulations for both single- and multiple-encounter scenarios, all of which adhered to COLREGs-defined avoidance obligations. Furthermore, we evaluated the performance of the proposed method by comparing its results with those obtained using conventional VO and A* algorithms. The findings indicate that the proposed method is superior to the A* algorithm in terms of steering away from collisions in complex multiple-encounter scenarios. Additionally, the proposed method significantly reduces the distance traveled by the ship to avoid potential collisions, with improvements of up to approximately 6.6% compared with alternative algorithms. We expect that this reduction will enhance safety and provide a more efficient anti-collision path.
中文翻译:

海上自主水面舰艇速度障碍与A*算法防碰撞路径规划方法
随着船舶规模的不断增大和自主航行需求的不断增加,确保船舶安全不再是唯一的问题;应提高防碰撞技术的效率。在本文中,我们提出了一种新颖的混合防碰撞路径规划方法,称为 VO-PATH。该方法结合了保证自主船舶防碰撞的速度障碍(VO)算法和以其优化路径能力而闻名的A*算法的优点。为了评估所提出方法的有效性,我们对单次和多次遭遇场景进行了防碰撞模拟,所有这些都遵守 COLREG 定义的回避义务。此外,我们通过将其结果与使用传统 VO 和 A* 算法获得的结果进行比较来评估该方法的性能。研究结果表明,在复杂的多次遭遇场景中避免碰撞方面,所提出的方法优于 A* 算法。此外,所提出的方法显着减少了船舶行驶的距离,以避免潜在的碰撞,与替代算法相比,改进幅度高达约 6.6%。我们预计这种减少将提高安全性并提供更有效的防碰撞路径。
更新日期:2024-02-04
中文翻译:
海上自主水面舰艇速度障碍与A*算法防碰撞路径规划方法
随着船舶规模的不断增大和自主航行需求的不断增加,确保船舶安全不再是唯一的问题;应提高防碰撞技术的效率。在本文中,我们提出了一种新颖的混合防碰撞路径规划方法,称为 VO-PATH。该方法结合了保证自主船舶防碰撞的速度障碍(VO)算法和以其优化路径能力而闻名的A*算法的优点。为了评估所提出方法的有效性,我们对单次和多次遭遇场景进行了防碰撞模拟,所有这些都遵守 COLREG 定义的回避义务。此外,我们通过将其结果与使用传统 VO 和 A* 算法获得的结果进行比较来评估该方法的性能。研究结果表明,在复杂的多次遭遇场景中避免碰撞方面,所提出的方法优于 A* 算法。此外,所提出的方法显着减少了船舶行驶的距离,以避免潜在的碰撞,与替代算法相比,改进幅度高达约 6.6%。我们预计这种减少将提高安全性并提供更有效的防碰撞路径。


























 京公网安备 11010802027423号
京公网安备 11010802027423号