Genetic Programming and Evolvable Machines ( IF 2.6 ) Pub Date : 2024-02-21 , DOI: 10.1007/s10710-024-09480-8 Lorenzo Bonin , Luigi Rovito , Andrea De Lorenzo , Luca Manzoni
|
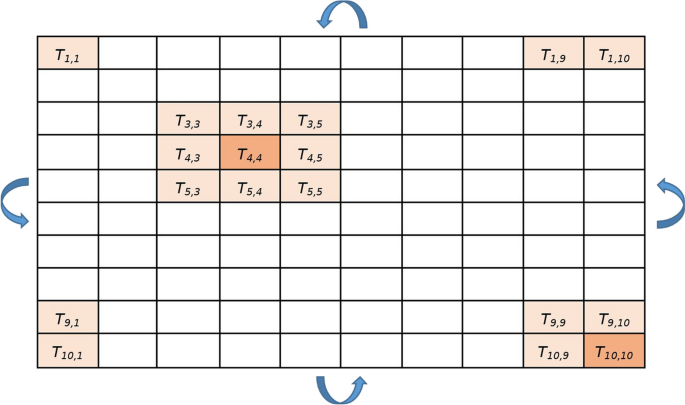
Among the different variants of Genetic Programming (GP), Geometric Semantic GP (GSGP) has proved to be both efficient and effective in finding good solutions. The fact that the operators of GSGP operate on the semantics of the individuals in a clear way provides guarantees on the way the search is performed. GSGP is not, however, free from limitations like the premature convergence of the population to a small–and possibly sub-optimal–area of the search space. One reason for this issue could be the fact that good individuals can quickly “spread” in the population suppressing the emergence of competition. To mitigate this problem, we impose a cellular automata (CA) inspired communication topology over GSGP. In CAs a collection of agents (as finite state automata) are positioned in a n-dimensional periodic grid and communicates only locally with the automata in their neighbourhoods. Similarly, we assign a location to each individual on an n-dimensional grid and the entire evolution for an individual will happen locally by considering, for each individual, only the individuals in its neighbourhood. Specifically, we present an algorithm in which, for each generation, a subset of the neighbourhood of each individual is sampled and the selection for the given cell in the grid is performed by extracting the two best individuals of this subset, which are employed as parents for the Geometric Semantic Crossover. We compare this cellular GSGP (cGSGP) approach with standard GSGP on eight regression problems, showing that it can provide better solutions than GSGP. Moreover, by analyzing convergence rates, we show that the improvement is observable regardless of the number of executed generations. As a side effect, we additionally show that combining a small-neighbourhood-based cellular spatial structure with GSGP helps in producing smaller solutions. Finally, we measure the spatial autocorrelation of the population by adopting the Moran’s I coefficient to provide an overview of the diversity, showing that our cellular spatial structure helps in providing better diversity during the early stages of the evolution.
中文翻译:
细胞几何语义遗传编程
在遗传编程 (GP) 的不同变体中,几何语义 GP (GSGP) 已被证明在寻找良好解决方案方面既高效又有效。GSGP 的算子以清晰的方式对个体的语义进行操作,这一事实为搜索的执行方式提供了保证。然而,GSGP 也存在一些局限性,例如群体过早收敛到搜索空间的一个小区域(可能是次优区域)。造成这个问题的原因之一可能是优秀个体可以在群体中迅速“传播”,从而抑制竞争的出现。为了缓解这个问题,我们在 GSGP 上采用了受元胞自动机 (CA) 启发的通信拓扑。在 CA 中,代理的集合(作为有限状态自动机)位于n维周期性网格中,并且仅与其邻域中的自动机进行本地通信。类似地,我们在n维网格上为每个个体分配一个位置,并且个体的整个进化将通过对每个个体仅考虑其邻居中的个体而在本地发生。具体来说,我们提出了一种算法,其中,对于每一代,对每个个体的邻域子集进行采样,并通过提取该子集中的两个最佳个体(用作父代)来执行网格中给定单元的选择用于几何语义交叉。我们将这种细胞 GSGP (cGSGP) 方法与标准 GSGP 在八个回归问题上进行比较,表明它可以提供比 GSGP 更好的解决方案。此外,通过分析收敛率,我们表明无论执行的代数如何,都可以观察到改进。作为副作用,我们还表明,将基于小邻域的细胞空间结构与 GSGP 相结合有助于产生更小的解决方案。最后,我们通过采用 Moran's I 系数来测量种群的空间自相关性,以提供多样性的概述,表明我们的细胞空间结构有助于在进化的早期阶段提供更好的多样性。


























 京公网安备 11010802027423号
京公网安备 11010802027423号