Precision Agriculture ( IF 6.2 ) Pub Date : 2024-02-20 , DOI: 10.1007/s11119-024-10118-z Minghui Wang , Jian Xu , Jin Zhang , Yongjie Cui
|
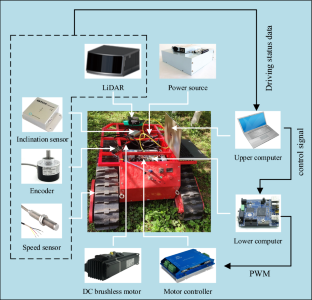
Autonomous robot-based orchard operations will become an alternative solution in the field of precision agriculture. One of the keys to robotic work is to achieve autonomous navigation that is as accurate as possible to ensure the most accurate working effect. In this work, we propose an orchard path fitting and navigation method based on the fusion of improved A-Star algorithm and Support Vector Machine Regression (SVR) to meet the requirements of autonomous navigation crawler platform for autonomous navigation in orchard environment and ensure accuracy. In this study, the actual speed and turning radius of the left and right tracks of the crawler platform were collected under 5 different slopes and 400 sets of different theoretical speed combinations of left and right tracks through the design nesting test, and the motion model of the crawler platform was constructed based on SVR. Orchard point cloud data were obtained by 3D solid-state LiDAR, and the improved A-star algorithm was used to fit the navigation path and calculate the turning curvature radius. Taking this curvature radius as the optimal navigation target value, the motion model predicts the optimal theoretical speed of left and right tracks, which is used as a reference for autonomous navigation. The comparison experiment of autonomous navigation was carried out in two modes: traditional and improved A-Star algorithm. The results show that the average values of the maximum lateral and longitudinal deviation of the improved automatic navigation method between orchards row are 6.90 cm and 9.88 cm, respectively. Compared with the method combined with the traditional A-Star algorithm and SVR, the values were 8.94 cm and 10.88 cm and were optimized by 29.57% and 10.12%, respectively. The autonomous navigation method proposed in this paper can meet the needs of orchards rows autonomous navigation, and can be widely applied to different orchard site environments (slope, ground obstacles, bad surface conditions), which can provide reference for the production practices of unmanned orchards.
中文翻译:
基于改进a-star算法与SVR相结合的果园行自主导航方法
基于机器人的自主果园作业将成为精准农业领域的替代解决方案。机器人工作的关键之一是实现尽可能准确的自主导航,以保证最准确的工作效果。在本工作中,我们提出了一种基于改进A-Star算法和支持向量机回归(SVR)融合的果园路径拟合和导航方法,以满足自主导航爬虫平台在果园环境下自主导航的要求并保证精度。本研究通过设计嵌套试验,采集了履带平台左右履带在5种不同坡度、400组不同理论速度组合下的实际速度和转弯半径,并建立了履带平台左右履带的运动模型。基于SVR构建爬虫平台。利用3D固态激光雷达获取果园点云数据,采用改进的A-star算法拟合导航路径并计算转弯曲率半径。以此曲率半径作为最优导航目标值,运动模型预测左右轨迹的最优理论速度,作为自主导航的参考。自主导航对比实验采用传统A-Star算法和改进A-Star算法两种模式进行。结果表明,改进后的果园行间自动导航方法的最大横向和纵向偏差平均值分别为6.90 cm和9.88 cm。与传统A-Star算法和SVR相结合的方法相比,其值为8.94 cm和10.88 cm,分别优化了29.57%和10.12%。本文提出的自主导航方法可以满足果园行间自主导航的需求,可广泛应用于不同果园场地环境(坡度、地面障碍物、恶劣地表条件),可为无人果园的生产实践提供参考。 。


























 京公网安备 11010802027423号
京公网安备 11010802027423号